|

|

|

|

|

|

|

|
NSF Sponsored Workshop Workshop publications:
HTML version of workshop report: Ice-Based Observatories:
Woods Hole Oceanographic
Institution Compiled by November 12, 2004
2. The role of Ice Based Observatories (IBOs) in an Arctic 3. Requirements and Challenges for
IBOs 4. Summary and Recommendations Appendix 1: Plans for Arctic Observing
Systems An NSF-sponsored workshop entitled “Arctic Observing Based on Ice-Tethered Platforms” was held at the Woods Hole Oceanographic Institution in Woods Hole, MA from June 28-30, 2004. The assembly of 55 workshop participants from 8 countries that included Arctic scientists, engineers, industry representatives and program managers was tasked with identifying requirements for and components of the next generation of ice-based technologies for observing systems in the Arctic Ocean. Instrument development and project coordination were also discussed. The most important general conclusion of the Woods Hole workshop was that practical, cost-effective and proven Ice-Based Observatory (IBO) designs presently exist, can be readily extended to provide interdisciplinary observations, and should be implemented expeditiously as part of a coordinated effort to observe the coupled Arctic atmosphere-ice-ocean system. Specific recommendations were: - A relatively simple and robust IBO array, based on presently available technology, should be implemented immediately as part of a stepwise ramp-up to a multi-component, interdisciplinary Arctic observing system. An international body will be required to coordinate the various national programs (eliminate overlap, insure no data holes) and insure compatibility of data and their widespread distribution. - The 25 years of International Arctic Buoy Program (IABP) drift trajectories, existing data climatologies and available numerical simulations should be exploited to derive insight to optimal array design, deployment strategies, sampling intervals, and expected performance of an IBO array. - Since ice-based observations at a given site may consist of a distributed set of subsystems developed by multiple PIs, the logistical infrastructure for getting to the deployment sites is one of the most important shared assets of the observing system. A long-term, internationally coordinated logistics plan should be developed as an essential component in establishing an IBO array. - IBO designs should provide accommodation for novel sensors, acoustic receivers, and communication and navigation capabilities for mobile platforms. Emerging technologies for Arctic observation (including but not limited to: unattended biological and chemical sensors, electromechanical sensors, autonomous oceanographic vehicles and drifters, and unmanned aerial vehicles) should be developed within the framework of an integrated Arctic observing system. Ice-based instrument systems are a proven means of acquiring unattended
high quality atmosphere, ice, and ocean data from the central Arctic
during all seasons. Arctic Change is ongoing and measurements need
to begin now. An array of IBOs, deployed and maintained throughout
the central Arctic, is envisioned to observe the spatial structure
and annual to decadal variations of the polar atmosphere-ice-ocean
environment as one component of a coordinated Arctic Observing System The Arctic Ocean's role in global climate - while now widely appreciated - remains poorly understood. Lack of information about key processes and their interconnectivity within the oceanic, cryospheric, biological, atmospheric and geological disciplines will continue to impede physical understanding, model validation, and climate prediction until a practical observing system is designed and implemented. A review of recently observed changes in the physical and biological state of the Arctic and a justification for future Arctic observations are contained in the supporting document of the U.S. National Science Foundation’s “Study of Environmental Arctic Change” program (SEARCH; http://psc.apl.washington.edu/search/). Comparable Arctic study programs have been conceived as an international contribution to the proposed International Polar Year 2007/2008 (http://www.aosb.org/ipy.html). Future directions in instrument development for Arctic studies were also considered at a workshop at the Monterey Bay Aquarium Research Institute in autumn 2002 (http://www.mbari.org/rd/ArcticInstrumentationWorkshop). An important product of all of these discussions is a coherent vision for future Arctic research and observations. Three main components of this vision have been identified: (1) manned expeditions with enhanced capabilities; (2) basin-wide networks of autonomous ice-based instrument systems, bottom-anchored sensors and mobile platforms; and (3) cabled oceanographic observatories. Following up on the second of these themes, an international workshop entitled “Arctic Observing Based on Ice-Tethered Platforms” was held at the Woods Hole Oceanographic Institution in Woods Hole, Massachusetts, USA from June 28 to 30, 2004. The assembly of 55 workshop participants from 8 countries that included Arctic scientists, engineers, industry representatives and program managers was tasked with identifying requirements for and components of the next generation of ice-based technologies for observing systems in the Arctic Ocean as part of a coordinated effort to observe the coupled Arctic atmosphere-ice-ocean system. The idea of ice-mounted instruments or drifting ice-anchored buoys is certainly not new. The first scientific drifting platform was Nansen’s Fram (1893-1896) which, over a three year period, drifted with the ice across the Arctic while making atmospheric and oceanic observations. A similarly remarkable scientific expedition that involved drifting on a sea-ice floe was accomplished by the USSR in 1937. That drift continued for 274 days, during which time the station traveled more than 2600 km. This began the "North Pole" station investigations that opened a new era in Arctic studies. From 1937 to the present, multinational drifting stations, ice camps and icebreaker programs have provided very important information from the Arctic. Autonomous instruments have become an increasingly important source of Arctic data. Since 1978, observations from the International Arctic Buoy Program (IABP) have contributed significantly to polar science by returning meteorological and sea-ice drift data for real-time operational requirements and research purposes (http://IABP.apl.washington.edu/Citations). Buoys with subsurface instrumentation have also been used with great success. Between 1985 and 1994, the Polar Science Center, University of Washington deployed 24 Polar Ocean Profiler (or SALARGOS) data buoys. And from 1992-1997, the Woods Hole Oceanographic Institution (WHOI) in collaboration with the Japan Agency for Marine-Earth Science and Technology (JAMSTEC) developed and deployed six Ice-Ocean Environmental buoys (IOEB; http://ioeb.whoi.edu/index.htm). Since 2000, JAMSTEC Compact Arctic Drifter (J-CAD) buoys (http://www.jamstec.go.jp/arctic/J-CAD_e/jcadindex_e) have been measuring the structure of upper-ocean currents and water properties under multi-year ice floes. Also beginning in spring 2000, an international research team supported by NSF has conducted annual expeditions each April to the North Pole to service and install an ensemble of autonomous scientific platforms, including a variety of sensors and instrument systems, collectively called the North Pole Environmental Observatory (NPEO, http://psc.apl.washington.edu/northpole/). Experience gained in these studies was discussed by workshop participants and used to develop the concept of an array of ice-based instrument systems or Ice-Based Observatories (IBOs) necessary to satisfy the needs of international multidisciplinary Arctic study programs. This workshop report is organized as follows: Section 2 discusses how an IBO array fits into an overall Arctic Observing System, Section 3 describes the requirements and challenges for development and implementation of IBOs, and Section 4 provides a summary of key points from the workshop and recommendations for IBO development and implementation. The first four appendices provide further details about international Arctic observing programs, the specifics of interdisciplinary observations from IBOs, and a possible scenario for interaction of autonomous and Lagrangian platforms with IBOs, respectively. The fifth appendix contains all submitted workshop abstracts and the sixth appendix contains a list of workshop participants. 2. The Role of Ice-Based
Observatories in an Arctic Observing System
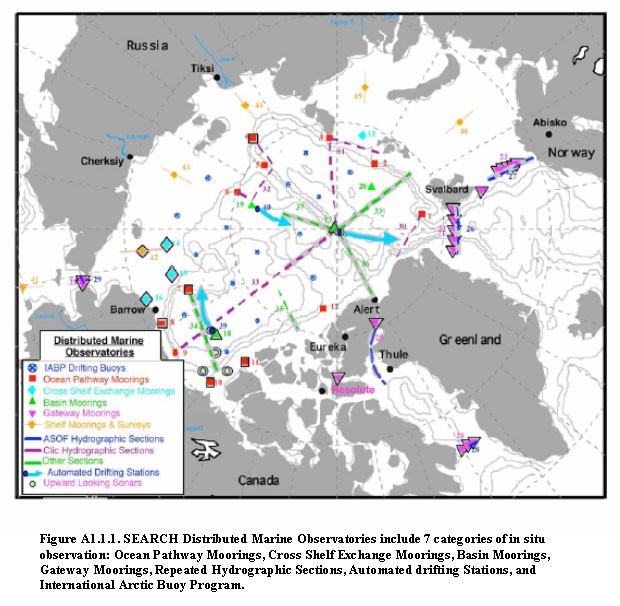
There are many national and multinational initiatives for Arctic observations. Some are still in the planning stage, whereas others are already being implemented or are well established. Five prominent Arctic observing concepts were reviewed at the workshop: 1) the Study of Environmental Arctic Change (SEARCH) Observational System, including NOAA’s enhanced network of ice mass balance and upper ocean buoys; 2) the Arctic Ocean Observing System (AOOS) prepared for the International Polar Year in 2007-2008; 3) a Hybrid Arctic Float Observation System (HAFOS); 4) an acoustic-based observing network; and 5) an Arctic Ocean Monitoring System (AOMS) developed at the Instrumentation for Arctic Ocean Exploration workshop. Detailed descriptions of each of these concepts are included in Appendix 1, and a description of the ongoing IABP is given in Appendix 2. It was noted at the workshop that each of the Arctic observing concepts included ice-based observatories of some type as a central element. It is clear from the various observing system designs that numerous
tools can be applied to the study of the Arctic environment, including
satellite remote sensing, autonomous ice-based buoys and drifting
stations, ocean moorings, icebreaker-based field campaigns and hydrographic
transects, cabled observatories, mobile platforms (e.g., drifters,
profiling floats, gliders, Autonomous Underwater Vehicles (AUVs),
Unmanned Aerial Vehicles (UAVs)) and numerical models. For example,
satellite remote sensing provides the large-scale snapshots of such
basic parameters as ice distribution, melt zone, and cloud fraction
at intervals of half a day to a week. Buoys and moorings can contribute
high temporal resolution and can measure parameters currently unavailable
from space including ice thickness, internal ice temperature, and
ocean temperature and salinity. Field campaigns can be used to explore,
in detail, the processes that govern the ice cover. Numerical models
can be used to assess the character of the changes in the ice cover
and predict the impact of these changes on other elements of the
climate system. Thus, an IBO array was seen as a critical element
for observation of the atmosphere-ice-ocean system in the Arctic,
but it was recognized that such an array must be integrated with,
and complementary to, other observational and modeling components
to create a comprehensive Arctic observing system.
It was concluded that IBOs must be a key element of any comprehensive Arctic observing system, that IBOs are complementary to existing and planned observing system elements, and that IBO development should explicitly consider integration with other observing-system elements (e.g. satellites and other mobile and fixed platforms, see Sec. 3.4). An IBO network affords extraordinary opportunities for outreach activities, because of the public interest in both the Arctic and climate change. Data can be streamed to public web sites in near-real time, as can photographs and commentaries from field camps. The breadth of activities affords considerable opportunities to engage the next generation of researchers in such diverse fields as computer science, engineering, biology, chemistry and geophysics.
Workshop participants identified IBO’s as automated, drifting, ice-based sensor systems providing comprehensive data from the Arctic environment and incorporating the multidisciplinary needs of biological, chemical and physical oceanography, as well as different aspects of atmospheric and sea-ice studies. Moreover, in addition to supporting suites of sensors, these observatories may also serve in a network of acoustic receivers, as data transmission nodes and navigation beacons for autonomous vehicles operating between the stations. The basic requirements identified at the workshop for a future generation of ice-based unmanned platforms are: • Observation and real-time reporting, with high vertical resolution and high accuracy, of an interdisciplinary suite of parameters from the near-surface atmosphere, sea-ice, and upper ocean for multiple years (assuming deployment on robust ice floes) at temporal resolutions appropriate for each parameter; • Ease of deployment from landed aircraft and helicopters in addition to deployment by icebreaker; • Modest cost, allowing them to be deployed in large numbers (analogous to the present IABP) and, in some cases, to be considered expendable; • Accommodation, through standard interface and communication protocols, of future surface and/or subsurface instrumentation, including acoustic communication (for data transfer, and navigation) with other mobile and fixed platforms. A more detailed description of IBO requirements, and associated challenges, are in the following sections. 3.1. Spatial and temporal
coverage of an IBO array
Recent observations and modeling results indicate that the Arctic system is particularly sensitive to and of considerable importance in the dynamics of global change. Our understanding of the Arctic's sensitivity and dynamic linkages is hampered by poorly known oceanic variability. Since the Arctic Ocean is an important climatic component of both the Arctic and the global system, knowledge of the Arctic Ocean changes based on sustained observations is essential to correctly interpret processes of atmosphere-ice-ocean interactions and their relation to the climate change problem. The Arctic Ocean area can be subdivided into several sub-regions according to objective parameters that characterize their climate and its variability. For example, regions which are covered by sea-ice year round and regions where sea-ice coverage changes seasonally need different instruments and supporting platforms. Similarly, its area can be sub-divided according to bathymetric features and natural boundaries of the Arctic Ocean, using straits, marginal seas, and deep basin boundaries. Likewise, the Arctic Ocean can be described according to natural layers or water masses, which in general, include surface water, Pacific Water, Atlantic Water and deep water masses. In these contexts, the observation strategy, tactics and instrumentation requirements vary substantially. In theory, it is necessary to include all possible regions, water mass and layers and processes of the Arctic Ocean, but in practice it is important to formulate priorities and determine major scientific problems that can be most readily addressed. As initially conceived, a typical IBO was considered to be deployed in the multi-year pack ice of the central Arctic basin and include a long "tether", or vertical instrument string, that would penetrate several hundred meters into the water column. Figure 3.1.1 schematically shows different elements of the Arctic Ocean and identifies spatial and temporal boundaries for this region. In the permanent ice zone, one sees that IBOs with tethers as long as 800 m are able to sample at least 40% of the Arctic Ocean area (excluding the Bering and Greenland Seas, and bays within the Canadian Archipelago). Due to its permanent ice cover and remoteness, this region remains the most inaccessible part of the world, which also makes it particularly attractive for sustained autonomous observations.
Based on these considerations, the workshop primarily concentrated on the means for sustained observations in central Arctic Ocean (water depths > 800m). The participants mainly considered long-tethered IBOs that would operate in deep waters up to the continental margins of the Arctic Ocean, but not encompass the shelf seas. Arctic shelf seas were not considered a target location for long-tethered IBOs because, in addition to being shallow, they tend to have few multi year ice floes that can support the systems year round. It is noted however that a significant number of IABP trajectories have transited areas shallower than 800 m (e.g. on the Chukchi and Beaufort Shelves), suggesting IBOs with reduced-length tethers may in fact be able to survive for long times in some of these regions. Arctic shelves represent half of the Arctic Ocean surface area and have major physical, biological, and chemical influences on the deep basins. For example, the advection of fresh water from river run-off, the formation of new ice and brine-enriched shelf waters play a significant role in the formation of the cold halocline. It was thus recognized that there are compelling incentives to consider options for IBO deployment on shallow shelves, in seasonal ice zones, and in regions of highly deforming ice (e.g. simple, inexpensive IBOs with real-time data reporting capability designed to be "sacrificial" after a finite lifetime). It was proposed that, in combination with cable observatories, floats, AUVs, etc., simultaneous technological development of IBOs suited by cost and configuration to deployment and operation in this extremely dynamic sea-ice environment is needed to address the challenge of Arctic shelf monitoring.
In similar spirit, a different mix of instrumentation will be required to observe narrow, topographically-constrained boundary currents, the deep exchange flows between the Arctic sub-basins and the inflows and outflows between the Arctic and subpolar oceans. Here, bottom anchored arrays would seem most appropriate. The present workshop focused on IBO's. From the 25 years of archived IABP drift trajectories, with concomitant fields of physical ocean variables, has come some understanding of cycles on seasonal and longer time scales. Individual IBOs will continue to sample these fields and cycles in an irregular pattern over space and time. An array of IBOs will sample these fields sporadically in space, at rather low spatial resolution from an oceanographic viewpoint and perhaps not in the best places. What will one learn about the ocean from an array of IBOs? Could one have detected the Atlantic/Pacific frontal shift of the early 1990s with data from a typical array? Could one detect events of halocline ventilation? The archived IABP buoy data set from 1978-2000 could be used to simulate the sampling of historical data fields, in order to explore which circulation and hydrographic features would have been revealed by such an array of IBOs. One could also learn something about optimal array design and density (e.g. what would be the useful life, statistically, of an 800-m tether before grounding). Simulations of IBO system performance for ocean chemistry and biology might also be possible (e.g. could biological sensors be shut down for much of the year, to conserve power?). Figure 3.1.3 shows a very coarse time/space diagram for key physical processes and water mass distributions in the Arctic Ocean, and a rough indication of those processes and features that could be observed and quantified using Ice-Based Observatory technology. Here, a distinction is made between processes that could be observed directly (e.g. the location of water mass fronts) and those which indirect or statistical properties could be collected. Some features and processes (e.g. buoyancy-boundary currents, bottom water) are beyond the range of ITP and IBO technology. 3.2. Principal elements
of an Ice-Based Observatory
Workshop participants agreed that the capability to produce practical, cost-effective and proven IBO designs presently exists, can be readily extended to provide interdisciplinary observations, and should be implemented expeditiously as part of a coordinated Arctic observing system. A relatively simple and robust IBO array, based on presently available technology, should be implemented immediately as part of an incrementally developed, multi-component, interdisciplinary Arctic observing system. A large and diverse number of parameters and sensors are required to detect and quantify changing Arctic conditions. It is unlikely that a single platform will be able to accommodate all sensors and instruments, and still meet reasonable size, weight, and power requirements, so an observing system with multiple platforms at a single node is necessary. Furthermore, since a full, high resolution spatial survey for all relevant parameters is neither technically nor financially feasible, a hierarchy of the observed fields is needed. On the basis of this hierarchy, data from relatively cheap sensors, such as temperature and salinity, need to be available at comparable spatial and temporal resolution to the global Argo array. More complicated sensors, such as oxygen, nutrients or biological parameters, are to be added at the next level, the data from which can be evaluated in the context of the hydrographic fields. Simple sensors of relatively low cost and energy consumption can be mounted on basic, long duration IBOs, while more expensive and power hungry sensors may need to be employed on specialized, shorter duration IBOs.
The workshop participants recommended that an interdisciplinary suite of physical, chemical, biological, and geochemical parameters of the atmosphere, sea-ice, and ocean be obtained by IBOs. Descriptions of the scientific motivations and specific parameters identified during the workshop are presented briefly here (see Table 2) and in greater detail in Appendix 3. Atmospheric studies emphasized the need to determine the Arctic heat, humidity and momentum fluxes, and variability of radiative and turbulent properties, in addition to obtaining standard meteorological parameters (air temperature, barometric pressure, wind direction and velocity, etc). Sea-ice studies focused on measurements of the thermodynamics (growth, decay, and mass balance, including consideration of the snow cover and radiative properties) and the dynamics (deformation, ridging, and failure). Physical oceanographic studies primarily seek pressure, temperature, salinity and current measurements to understand the ocean circulation, freshwater and heat contents, vertical structures, water masses and other physical parameters. An improved understanding of surface fluxes, finescale to mesoscale ocean variability, and mixing processes were also considered important to better predict changes in the ice-ocean system. Biological and chemical studies stressed the need to understand processes occurring under the ice during winter, and to evaluate the seasonal and interannual variability of numerous biological and chemical parameters (nutrients, dissolved oxygen and other gases, PAR, fluorescence, optical, etc.) in the atmosphere, sea-ice and ocean on the same temporal and spatial scales as the physical variables. Geochemical tracer studies provide information about freshwater, ocean circulation and mixing processes that cannot be derived from physical measurements alone. While historically these tracer data have primarily been obtained by shipboard collection of water sample and subsequent analysis, it is important to pursue next-generation sensors (such as new sensors based on inline reaction chemistry, optical measurements and microfluidic systems) for integrating geochemical and biogeochemical measurements into autonomous IBOs.
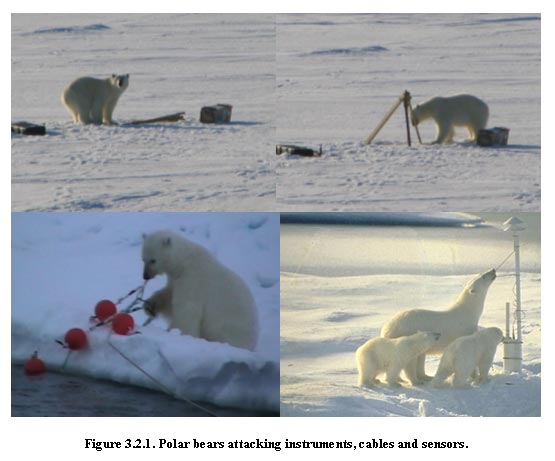
The capability to transmit near-real time data back to the laboratory is an essential ingredient of an IBO. At high latitudes, only a few options currently exist. The Argos data collection service has been a low bandwidth option for many years. Relatively recently, the Iridium Satellite System has made higher bandwidth mobile voice and data cellular telephone communications available for all latitudes, at reasonable cost and power requirements. Another important element of an IBO that is necessary to ensure longevity of the system, are mechanisms that deter interference by animals. Polar bears and foxes are the principal offenders that may destroy or render inoperable an ice-based platform. Buoy packages and any instruments or sensors which protrude from them (such as antennae and meteorological masts) may be pushed over, removed, or destroyed by bears. Bears are also particularly fascinated by moving things like anemometers. Cables are especially susceptible to digging and chewing by foxes, as well as handling by bears. The design of IBOs should certainly recognize these risks and should tap into existing expertise on animal deterrence to create the best defenses.
3.3. New Technologies
and Sensors for Ice-Based Observatories
Despite the excitement over ideas for new technology that were presented at the meeting, the consensus of scientists (as distinct from technology proponents) appeared to favor a relatively simple platform (at least for now) to keep IBO implementation costs relatively low. On the other hand, new sensor technology is required for sampling in all regions, not only the Arctic. From this view point, new sensors, and lower power versions of existing proven devices, should be endorsed within an initiative for new technologies for all oceanographic disciplines worldwide. At the same time, it must be recognized that there are additional challenges for developing instrumentation for polar regions, so that all new technology may not be applicable to the Arctic environment. For example, new micro- and nano-fabrication capabilities have revolutionized sensory systems. Micro and Nano ElectroMechanical Systems (MEMS and NEMS) have many advantages over their macro-scale counterparts. Low cost, small volume and weight, and low power consumptions are among the many attractive features of MEMS and NEMS sensors. MEMS/NEMS sensors can play a major role in the next generation of atmosphere-ice-ocean measurement systems. In order to reliably operate in harsh oceanic conditions (including polar regions), special MEMS/NEMS sensors must be designed. However, such developments have been limited due to the lack of immediate commercial interest. It is anticipated that the Arctic research community will benefit significantly from the development of MEMS/NEMS sensors for scientific applications, including polar regions. Unmanned aerial vehicles (UAVs), and in particular micro aerial platforms, are expected to introduce extraordinary capabilities for measurement and imaging in the polar region. Such vehicles are able to operate from land bases close to the area of interest or even from ice-based platforms. For more details and a summary refer to the presentation abstract by K. Monseni in Appendix 5. 3.4. Integration of
fixed and mobile assets
Because the Arctic region is data-poor and so hard to access, the Arctic Ocean is a good candidate location for concerted multi-platform, multi-sensor studies that rely on automated and autonomous systems that include fixed and mobile assets. Fixed assets or platforms include cabled observatories, mooring networks, beacons and acoustic transmitters while mobile assets or platforms include drifters, profiling floats, gliders, Autonomous Underwater Vehicles (AUVs), and Unmanned Aerial Vehicles (UAVs). Three levels of integration are envisioned at this time in order to develop IBOs and promote the IBO concept within a more comprehensive and multi-faceted Arctic observing system. The first level is integration of multiple sensors and platforms within an IBO “node”. Second, it is necessary to determine how the IBOs fit into an integrated system for Arctic observations. Third, because different elements of an Arctic Observing System have been proposed by different institutions, countries, and scientific groups (see Appendix 1), and it is likely that they would be funded independently, an integration and coordination effort is needed to ensure that the deployed systems can communicate with each other to some agreed upon extent (i.e. providing core data to a central telemetry system in a compatible format) without over-complicating the system to the point of lowering its flexibility, usefulness or reliability. Integration among elements of an IBO node: Various sensor packages are available as autonomous instruments and could be integrated to form an IBO node with a common energy supply and data telemetry system. Integrating these systems, however, is time consuming and susceptible to error. It may therefore be more effective to deploy a suite of independent instruments in close proximity, enjoying the benefit of joint logistics (transport for deployment, maintenance and potential recovery), but being operationally independent once deployed. This system is simpler, and is likely to benefit from shorter development time, lower deployment cost and smaller risk of failure than more complex systems. If one component fails, the other instruments will keep on working. For example, an effective scheme might be to deploy an ice tethered profiler and an acoustic ranging and communication station next to each other instead of installing sound sources and receivers on the profiling cable. Despite the appeal of independent subsystems, it may still be cost effective and logistically convenient to share data among the subsystems and/or utilize a common telemetery system for data transmission via satellite to ground stations. A dedicated study may be needed to optimize the design of IBO nodes, including identifying the demanding needs of multi-disciplinary sensors and instruments. Integration of fixed and mobile assets with an IBO node: IBOs ability to interact with fixed and mobile platforms can be exploited to benefit an overall Arctic observing system. For example, data uplink from subsurface moorings by means of an AUV or glider serving as a data shuttle. This could reduce costs whereby some moorings would then not require recovery for data return. Another example would be IBOs serving as navigation beacons for long-range AUVs running Arctic transects. Thus, accommodation should be made, through adoption of standard interface and communication protocols, for future surface and/or subsurface instrumentation. This would include acoustic communication (for data transfer, and navigation) with mobile platforms. The most important recommendation would be to ensure first that in addition to standard protocols for data transfer via satellite uplink, the IBOs have also the ability to exchange data with mobile platforms (undersea vehicles, gliders and either floating or other ice-surface vehicles), vessels (both surface and submarine), and aircraft, using both acoustic and radio frequency, such that the data collected will be retrievable by multiple pathways. This capability needs to be managed to minimize power drain (e.g., through scheduling or when data volume reaches a specified level), while remaining reliable, and robust, i.e., such that the failure of a single antenna or transmitter doesn't result in data loss. At a minimum, the IBO should be able to accept data from known floats and gliders, and transmit its data through Service Argos or Iridium satellite constellations. All mobile observing systems to be used under the ice need acoustic navigation. It is therefore of high priority to develop standards for navigation beacons. The highest priority is to determine the sound frequency and to ensure that deployed sound sources are compatible with all potential systems that are now under development. These problems are planned to be resolved under activities of the US-NSF PLUTO concept (Polar Links to Undersea Telecommunications and Observatories) which is a particularly versatile concept that would link acoustic tomography, cabled observatories, moorings, gliders and AUVs to provide coordinated synoptic Arctic data sets. Low frequency transmissions at 40 Hz would permit basin-wide acoustic tomography. However, the sound sources would be large and difficult to deploy and the accuracy of this band for navigation has yet to be determined. Transmitters at the medium frequency range of 260 Hz are small enough to be used on moorings and IBOs, but the effective range for this frequency is an open research question and is still under debate. Transmissions at 260 Hz seem to be promising from experience in the Weddell Sea where ranges of more than 600 km were obtained, but the use of the same frequency in the Arctic has resulted in significantly smaller range (~100 km in winter). If deployed on drifting IBOs the acoustic devices must be able to transmit their position, and therefore a code for transmission of position must be developed for common use. A possible scenario for interaction of autonomous and Lagrangian platforms with IBOs is presented in Appendix 4, which could be used as a starting point for IBO design and implementation. 3.5. Coordination and
oversight
No single institution can claim sufficient expertise to fully support
an Arctic observing system, therefore coordination of the efforts
of several institutions from different countries will be essential
for the successful development and implementation of a comprehensive
system. Multilevel international, interagency, and inter-institutional
coordination is needed for design, fabrication and implementation
of an IBO array in the Arctic. Several levels of coordination may
be needed at different stages of system development, implementation
and management. These stages include: IBO system design, fabrication,
and deployment, and the receipt, archiving, processing, and distribution
of data from the array. Accordingly, it is necessary to coordinate
sensor characteristics, inter-calibration procedures, deployment
and recovery operations, logistics plans, data extraction, processing
and distribution, reporting procedures, and, finally system improvements
in order to satisfy changing scientific goals and objectives which
will accompany this project as the results are processed and digested.
• Science Oversight Committee A Science Oversight Committee would play a key role in formulating, consolidating and coordinating scientific problems to be solved by an IBO array, and its integration into an Arctic Observing system. This committee would also consider the strategy and priorities of IBO array development and implementation, and respectively determine necessary steps in system improvements and changes in the future. There are several examples of managing operational observational oceanic projects such as Argo and IABP. This experience should be evaluated and modified accordingly, in order to take into account specific characteristics and limitations of the IBO project (multidisciplinary needs of biological, atmospheric, cryospheric and oceanic science; vast amount of information because of high vertical resolution and multi-sensor arrays; real time reporting, including communication with mobile and moving assets). An international body (International Coordination Committee) will be required to coordinate the various national programs (eliminate overlap, insure no data holes), create and maintain an efficient logistical structure to ensure the initial deployment and re-seeding of the array, and insure compatibility of data, their widespread distribution, and their storage in a robust and accessible archive. Arctic Change is ongoing and it is important to develop the IBO system quickly to monitor these changes. A stepwise ramping up of the multi-component system is needed, with accommodation for further components that can be added according to progress in sensor development, knowledge of Arctic change, and funding possibilities. The first step should be to bring into operation IBOs as a measurement system using existing sensors because few navigation, communication and power supply problems are expected with these. Later, additional components can be added as they become available, and/or are deemed necessary. Simultaneously, technological development of autonomous platforms (e.g., drifters, profiling floats, gliders, AUVs, and UAVs) should be promoted such that these technical hurdles can be cleared for these platforms, as well. An operational center with an executive office is needed to get the real work of logistics coordination, field deployment, and data collection/archiving done. The workshop recommends a call for proposals to run such a center. 3.6. IBO Deployment
and logistics
The types of proposed IBOs discussed at the workshop would generally require a moderate field operation for deployment, as well as for maintenance or recovery of certain specialized systems. For instance, deployment of an ice-tethered platform with subsurface instrumentation typically requires occupation of an ice floe, drilling a hole through the floe, installing the subsurface tether and instruments (usually with a mechanical tripod), and attaching the surface package and sensors. While some simple air beacons may be easily deployed by dropping from airplanes, masts with more complex meteorological sensors and Ice Mass Balance (IMB) buoys also require occupation of an ice floe and drilling holes for installation. Since an IBO would consist of a combination of these platforms, logistics associated with some type of field operation on the ice represents a shared asset. Accordingly, a long-term logistics plan would be an essential complement to scientific and technical plans to deploy an array of IBOs in the Arctic. The ARCUS produced, NSF sponsored report “Arctic Research Support and Logistics: Strategies and Recommendations for System-scale Studies in a Changing Environment” (available at http://www.arcus.org/Logistics/logistics03) should be considered in this regard. IBOs would be particularly well suited to sustain observations in the deepest, most inaccessible regions of the central Arctic basins (see section 3.1). Logistically, the challenge in the perennial ice is remoteness and difficulty of access by ships (high cost of heavy icebreakers) and aircraft (range limitations and landing sites). IBO deployments would not necessarily need their own (costly) single purpose cruise, but could inexpensively be deployed during other expeditions on an opportunity basis. Ship use would allow comprehensive surveys of the IBO site to be made at the time of the deployment, which would be useful in interpreting IBO data. The more remote parts of the IABP array have always been maintained via air drops from long-range patrol aircraft, but air dropping of the types of IBOs discussed at the workshop would probably not be practical. In the past, USN submarines have made some contribution to IABP deployments and could possibly be used to deploy IBOs. Another possibility is the identification of 'seeding' sites, convenient locations from which IBOs might distribute themselves over the Arctic Basin through ice drift over time. The histories of IABP trajectories, in conjunction with existing numerical simulations, provide the most useful existing information for the exploration of this concept. However, the basins only represent less than half of the area of the Arctic Ocean, and specialized IBOs should also be deployed over the shallow continental shelves, which are typically characterized by seasonal ice cover. In the seasonal ice zone, the challenge is associated less with difficulty of access than with required timing of access. Seeding may be required at intervals of few months. Seasonal cycles of other societal activity (e.g. marine re-supply) and darkness may be limiting if aircraft landings or the presence of a ship is required. 3.7. IBO Data reporting
and distribution
The workshop concluded that in order for the IBO array implementation to be valuable to the greater scientific community, usable products must be generated, such as the IABP datasets distributed by the Polar Science Center at the University of Washington, Seattle. It was noted that quality controlled, gridded fields combining the results from a critical mass of IABP buoys (tens or hundreds) over many years have served as the basis for many previous and ongoing climatologic studies and have reportedly been of greater interest to the community than raw time series from individual buoys. This was probably true for the range of Arctic research activities in the past; however, under the present conditions of Arctic change, for the purpose of developing comprehensive models of Arctic processes, and for the requirements of Arctic Ocean reanalysis problems formulated by SEARCH, it is extremely important to have at least two IBO products: • Information for scientific and operational needs (data assimilation for Arctic reanalysis, submarine navigation, process studies, remote sensing and modeling data validation). For these purposes, the data, once retrieved, should be vetted through a relatively simple preliminary processing and quality control, and made publicly available in near-real time with the accuracy and time resolution that it was collected at and stored in a publicly accessible format in an internet-accessible database, so a broad range of scientists could immediately obtain and analyze the operational data. Data standards exist for profile data through Argo and JCOMM, and are being coordinated through CliC and WCRP. Therefore it is recommended that IBO data formats should be coordinated with existing standards of data distribution and exchange. • A second level of data reporting and distribution, similar to the IABP datasets. These products should include high quality time series of all parameters, gridded fields, and derived characteristics (such as freshwater and heat content, water mass composition, etc.) and provide higher levels of data analysis useful for a broader range of Arctic community interests. These products should be consolidated monthly and/or annually, depending on community needs and recommendations. The workshop general consensus is that IBO data needs to be available in real time via the internet if possible, otherwise as soon as possible thereafter. It is recommended that the operational needs and the secondary level of data reprocessing and distribution be provided by the IBO executive office and its personnel under control of the coordination and oversight science committees. 4. Summary and Recommendations
Experience gained in previous studies was used by workshop participants to develop the concept of an array of ice-based instrument systems, or Ice-Based Observatories (IBOs) that would satisfy the needs of international Arctic science programs. Workshop participants identified IBOs as automated, drifting, ice-based sensor systems providing comprehensive data from the Arctic environment and incorporating the multidisciplinary needs of biological, chemical and physical oceanography, as well as different aspects of atmospheric and sea-ice studies. Moreover, in addition to supporting suites of sensors, these observatories may also act as a network of acoustic receivers, data transmission nodes for a mooring network and various autonomous platforms, and navigation beacons for autonomous vehicles operating near or between stations. 4.1. Requirements and
Challenges
The basic requirements identified at the workshop for a future generation of ice-based unmanned platforms are: • Observation and real-time reporting, with high vertical resolution and high accuracy, of an interdisciplinary suite of parameters from the near-surface atmosphere, sea-ice, and upper ocean for multiple years (assuming deployment on robust ice floes) at temporal resolutions appropriate for each parameter; • Ease of deployment from landed aircraft and helicopters in addition to deployment by icebreaker; • Modest cost, allowing them to be deployed in large numbers (analogous to the present IABP) and, in some cases, to be considered expendable; • Accommodation, through standard interface and communication protocols, of future surface and/or subsurface instrumentation, including acoustic communication (for data transfer, and navigation) with mobile platforms. Although much of the necessary IBO technology already exists and routine observations are presently underway using the IBO concept, there are a variety of challenges that must be addressed en route to the development of a comprehensive multi-disciplinary IBO array. Workshop participants agreed that platform instrumentation should be improved by continued development of profiling systems for atmosphere, ice and ocean with the goal of sampling biological and chemical variables on the same spatial and temporal scales as physical variables in order to separate biological and /or chemical transformations from changes due to physical mechanisms. Profiling systems for many physical variables are presently available or easily adapted for routine use in the Arctic, whereas apart from oxygen and nitrate sensors, bio-chemical profiling systems will require additional development effort. Relating to the platforms themselves, it was noted that IBOs would be best suited to deployment in perennial pack ice. However, the seasonal sea-ice zone accounts for a majority of the northern marine cryosphere, and most of this is in shallow water (<500 m). Specialized IBO designs will likely be needed for the seasonal ice zone, platform lifetimes will be short, and frequent re-deployments will be required. Alternate technology (e.g. profiling floats) may also be required. Finally, the integration of mobile assets with IBOs needs to be addressed in design studies. There are specific technological issues (e.g. navigation, communication and energy transfer) relating to interactions among IBOs, floats, gliders and AUVs that should be addressed concurrently with an IBO array implementation. 4.2. Distinguishing
features of the IBO concept
The following features distinguish the IBO concept from previously designed, developed, and implemented Arctic drifting observing platforms: • The IBO represents and satisfies the multidisciplinary needs of Arctic oceanic climate system covering each of the biological, atmospheric, cryospheric and oceanic regimes; • The IBO provides simultaneous, high vertical resolution data over sea-ice (near surface atmospheric boundary layer), under sea-ice (upper 800m ocean layer), and within sea-ice; • An array of IBOs is envisioned and, similar to IABP array, will allow coverage of more than 40% of the Arctic Basin area; • The IBO reports in near-real time, and data from IBO are openly available via the internet; • The IBO provides communication and data exchange capabilities among different observing systems including but not limiting to AUVs, moorings, gliders, floats, cable observatories, and acoustic tomographic systems. The combination of features listed above makes the IBO concept unique, and is the major accomplishment of the workshop. 4.3. Proof of concept:
IBO prototypes in the field
At least four prototypes versions of oceanic observing systems are already operating in the Arctic, providing real time information, including: • IABP buoy array accompanied by IMB buoys (see http://iabp.apl.washington.edu/, Appendix A1.1, and abstracts by Hanna et al. and Perovich et al. in Appendix 5) • JAMSTEC J-CAD buoy in combination with IMB buoys (see http://www.jamstec.go.jp/arctic/J-CAD_e/jcadindex_eand Kikuchi et al. abstract in Appendix 5) • WHOI’s Ice-Tethered Profiler (ITP) in combination with IMB buoy (see http://www.whoi.edu/itp/data, Appendix A1.5, and Krishfield and Toole abstract in Appendix 5). • North Pole Environmental Observatory (NPEO; which includes Arctic Ocean Flux Buoys (AOFB), J-CADs and IMB buoys (see http://psc.apl.washington.edu/northpole, http://www.oc.nps.navy.mil/~stanton/fluxbuoy, and abstracts by Stanton, Kikuchi et al., and Perovich et al. in Appendix 5), More information on each of these systems is also available in the workshop presentations at: http://www.whoi.edu/science/PO/arcticgroup/projects/ipworkshop_presentations.html. Therefore, practical, cost-effective and proven IBO designs presently exist, can be readily extended to provide interdisciplinary observations, and should be implemented expeditiously as part of a coordinated Arctic observing system. Arctic change is ongoing and measurements need to begin now to identify the causes of these changes. An array of IBOs maintained throughout the Arctic Ocean interior is envisioned to observe the spatial structure and annual to decadal variations of the polar atmosphere-ice-ocean environment. Practical, cost-effective and proven IBO designs presently exist, can be readily extended to include interdisciplinary observations, and should be implemented expeditiously as part of a coordinated Arctic observing system. Specific recommendations were: • A relatively simple and robust IBO array, based on presently available technology, should be implemented immediately as part of a stepwise development of a multi-component, interdisciplinary Arctic observing system. An international body will be required to coordinate the various national programs (eliminate overlap, insure no data holes) and insure compatibility of data and their widespread distribution. • The 25 years of IABP drift trajectories, existing data climatologies and available numerical simulations should be exploited to derive insight to optimal array design, deployment strategies, sampling intervals, and expected performance of an IBO array. • Since ice-based observations at a given site may consist of a distributed set of subsystems developed by multiple PIs, the logistics infrastructure for getting to the deployment sites is one of the most important shared assets of the observing system. A long-term, internationally coordinated logistics plan should be implemented as an essential complement to scientific and technical plans for an IBO array. • IBO designs should provide accommodation for novel sensors, acoustic receivers, and communication and navigation capabilities for mobile platforms. Emerging technologies for Arctic observation (including but not limited to: unattended biological and chemical sensors, electromechanical sensors, autonomous oceanographic vehicles and drifters, and unmanned aerial vehicles) should be developed within the framework of an integrated Arctic observing system. We gratefully acknowledge contributions from all workshop participants, and in particular the keynote speakers listed, along with a summary of their presentations and the workshop agenda, at http://www.whoi.edu/science/PO/arcticgroup/. Thomas Pyle of the National Science Foundation (NSF) provided the impetus for the workshop. Financial support was provided by NSF through Grant No. OPP-0349416 from the Office of Polar Programs.
Workshop participants acknowledged several designs
for Arctic Observing Systems, some of which are discussed below
(see also abstracts of presentations in Appendix 5
of this document and workshop Power Point presentations at the workshop
web site: A1.1. Study of Environmental
Arctic Change (SEARCH)
A review of recently observed changes in the physical and biological state of the Arctic and a justification for future Arctic observations are contained in the supporting document of the U.S. National Science Foundation’s SEARCH program (http://psc.apl.washington.edu/search/).
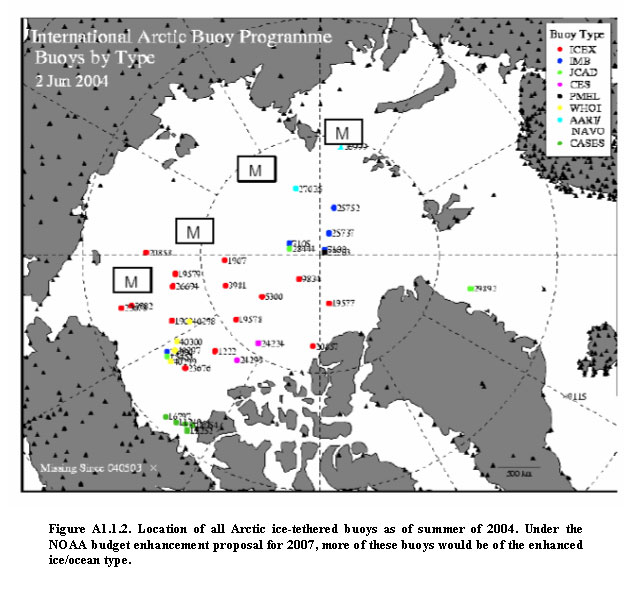
In general, NOAA’s plan for oceanic observatories (Figure A1.1.2) is in agreement with the SEARCH observational plan. In this context, the existing IABP program, as well as the NPEO, is being enhanced with deployment of IMBs. One aspect of the NOAA’s SEARCH initiative is to autonomously monitor changes in the thickness of the Arctic sea-ice cover (Overland et al., 2002).
A1.2. Arctic Ocean Observing
System (AOOS)
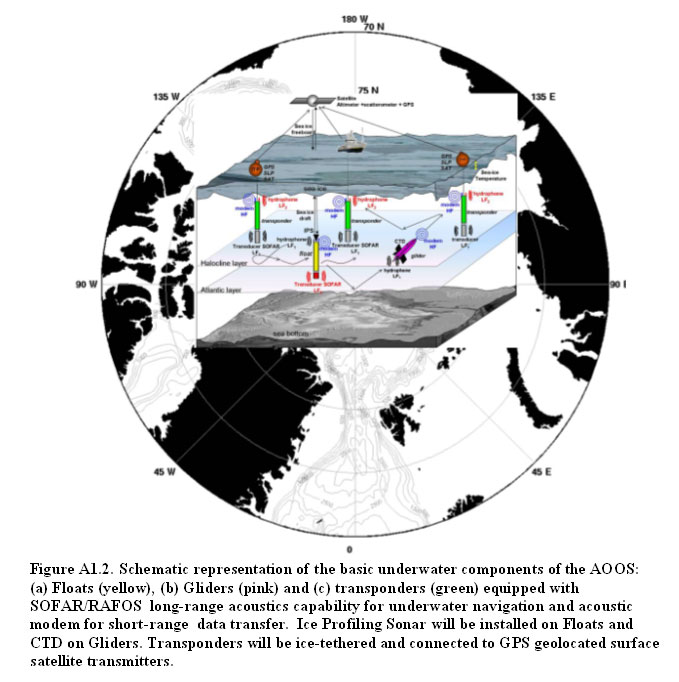
A design for an AOOS (http://www.aosb.org, Figure A1.2) was prepared for the International Polar Year in 2007-2008 and beyond on behalf of the Arctic Ocean Sciences Board. According to this plan AOOS mainly will address fundamental questions and issues concerning the Arctic ice-pack and its seasonal and interannual variability, taking into consideration internal and external factors (thermodynamics and dynamics) influencing the growth and decay of sea-ice. The AOOS should operate all year long and for several years in a quasi autonomous mode. The AOOS would be articulated around four main components: (1) a space component based on remote sensing, satellite data transmission and precise geolocations, (2) a surface component based on ice-tethered platforms equipped with meteorological and oceanographic sensors (including sea-ice), and (3) an underwater component based on autonomous underwater ballast controlled floats equipped with ice profiling upward looking sonars (ULS) and self regulated gliders equipped with CTD. An integrator component, (4), will be dedicated to data analysis and data integration in conjunction with numerical models to bridge gaps and develop interactions and synergies between observations and models.
A1.3. Hybrid Arctic Float Observation
System (HAFOS)
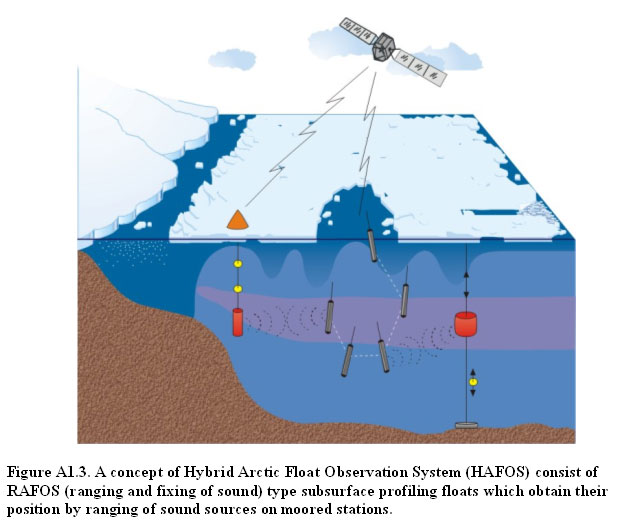
HAFOS is a vision for extension of the Argo system of vertically profiling floats (http://www.argo.ucsd.edu/, Figure A1.3) into the Arctic Ocean, where the presence of ice limits use of existing designs. Since location and data transmission under the ice is presently only possible by acoustic means, an observation system of water mass properties and currents in the deep Arctic or Antarctic Ocean requires the combination of different technologies. It comprises ice resistant profiling subsurface floats, surface drifters on the ice and moored stations. The envisioned system consist of RAFOS (ranging and fixing of sound) type subsurface profiling floats which obtain their position by ranging of sound sources on moored stations. The float measures vertical profiles of temperature and conductivity/salinity, but it does not reach the surface if it floats under the ice. Therefore it has to store the data until it reaches an ice free area. In this first version no real time data can be obtained and the data are lost, if the float does not reach open water again. Therefore a second step is planned to install a sound source on the float (SOFAR). During the period when the float profiles under the ice it transmits a reduced data set acoustically, since the energy consumption for sound transmission is the limiting factor of the system. The full data set is stored until the floats can reach the surface in open water. Receivers are mounted on the moorings with the sound sources for ranging which can be under a seasonally varying or even permanent sea-ice cover and on surface stations deployed as buoys drifting on the sea-ice. From the sea-ice buoys data can be transmitted to satellites to be available in real time. The development of HAFOS is planned to take 10 years. The first steps were successful to deploy floats which will not return to the surface under ice cover and to determine the acoustic range in ice covered areas by use of RAFOS floats.
A1.4. Arctic Acoustic
Thermometry and Tomography
Acoustic remote sensing, namely acoustic thermometry, was first demonstrated in the Arctic Ocean in 1994 revealing the basin scale warming of the Atlantic Water layer. Acoustic thermometry and tomography (Figure A1.4) provides an integrated measurement of temperature and currents that can be applied to a variety of observational scales. For basin scales acoustic thermometry integrates over mesoscale and higher wave number phenomena to provide large scale averages of temperature and heat content that are needed for climate oriented studies and are difficult, if not impossible, to obtain with an ensemble of point measurements, especially in the Arctic Ocean. Measurement of transport, thermocline depth, even salinity and sea-ice properties are also possible and are in various stages of development.
Acoustic remote sensing requires an acoustic source and hydrophones. These can be installed on “conventional” oceanographic moorings and can therefore extend the point measurements obtained at the moorings with integrated measurements between the moorings. If the acoustic capability is designed into the moorings at the planning stages the marginal cost is comparable to other sensor packages. Connecting such Arctic Ocean moorings back to shore is envisioned exploiting an existing sea-shore link in the Lincoln Sea and a planned link into the Beaufort Sea from Barrow, Alaska providing the real-time synoptic capability
An NSF-sponsored workshop entitled, “Instrumentation for Arctic Ocean Exploration: Technology for accessing the water column and seafloor” was held at the Monterey Bay Aquarium Research Institute in Moss Landing, CA from October 16-18, 2002. The workshop was convened in response to the fact that: (1) the Arctic Ocean is a high-priority target for a diverse set of scientific investigations including key topics such as global climate change, life in extreme environments, and the origin of life on Earth, (2) virtually all Arctic oceanography, regardless of discipline, is limited by a small set of common technological barriers, (3) a number of recent technological developments present opportunities to overcome these barriers and truly revolutionize the conduct of Arctic oceanography, and (4) the aggregate national funding for Arctic operations, research, and instrumentation is at alarmingly low levels after being in steady decline for nearly a decade. There are five over-arching technical challenges that presently
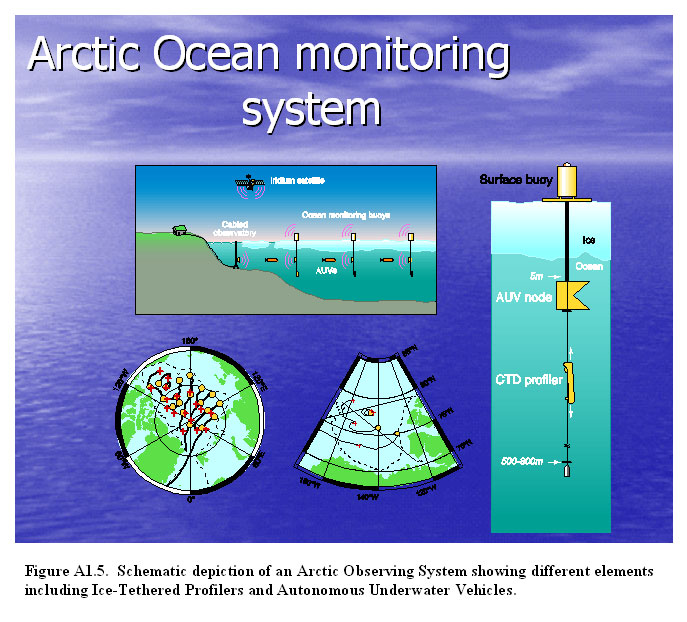
limit most types of Arctic research: An important outcome of the workshop was the development of a coherent vision for the future of Arctic research that would fundamentally change the way observations are made in the Arctic by exploiting the potential of new technologies to solve these technical challenges and create a new paradigm for Arctic oceanography. The three components of this vision are; (1) expeditions with enhanced capabilities, (2) a basin-wide network of ice-mounted buoys and mobile platforms (i.e. gliders, drifters, autonomous underwater vehicles), and (3) cabled oceanographic observatories with real-time data and power connections to shore. In this vision (Figure A1.5), ice-tethered platforms are the key
element responsible for ocean sampling will be augmented with AUV
transects to provide synoptic observation of the Arctic basin at
regional scales. The drifting ice buoys will serve as acoustic navigation
beacons for AUV operations, and will utilize long, short, and ultra-short
baseline acoustic technologies to establish waypoints for AUV navigation
and for acoustic homing. AUVs will be developed with complementary
hardware and software to allow for operation within the buoy and
cabled network, and will utilize docking technology to allow for
data and power transfer from the fixed resources to the AUVs at
key nodes.
Appendix 2: The International Arctic Buoy Program  The International Arctic Buoy Programme (IABP, http://iabp.apl.washington.edu/index.html) maintains a network of drifting buoys in the Arctic Ocean to provide meteorological, oceanographic and sea-ice data for real-time operational requirements and research purposes including support to the World Climate Research Programme (WCRP) and the World Weather Watch (WWW) Programme of the World Meteorological Organization (WMO). The IABP consists of 23 Participants from 9 nations, and is organized as an action group of the WMO Data Buoy Coordination Panel. Participation in the IABP is open and voluntary. The IABP functions according to a set of Operating Principles and Terms of Reference for the IABP Coordinator. The IABP operates under the guidance of an Executive Committee (Excomm) that is elected by the Participants. The directives of the Excomm and the daily operations of IABP are carried out by the Coordinator, acting as the focal point for the Programme, and performing the following functions in collaboration with the Participants: • Monitor data in near Real-Time The IABP began in 1978 and is ongoing, with a 25-plus year track record of producing real-time and research-quality data characterizing the Arctic Ocean environment. IABP's gridded datasets have emphasized surface air pressure, surface (2 meter) air temperature, and large scale sea-ice velocity. In addition, IABP has acquired and made available datasets on upper ocean temperature and salinity structure, and sea-ice mass balance. Over 450 scientific and technical publications have benefited from observations of the IABP (http://IABP.apl.washington.edu/Citations). For example, IABP data were fundamental to studies: (1) showing the drop in Arctic sea level pressure and increase in cyclonic surface winds during the late 1980's-early 1990's; (2) showing the patterns of multidecadal trends in surface temperature over the Arctic Ocean; (3) showing the changing patterns and decrease in areal extent of old (> 10 year) sea-ice in the Arctic Ocean from 1979-2004. Enhancements of the IABP have been recommended
as a key component of the SEARCH Arctic Ocean Observing System,
including Ice Mass Balance Buoys (IMB) and ocean Temperature-Salinity
(T-S) buoys. The IABP plan for 2005 includes 13 IMB's and 6 T-S
buoys (http://iabp.apl.washington.edu/AOOS/).
The combination of automated systems to measure meteorological,
sea-ice (including mass balance) and upper ocean variables has been
dubbed "Automatic Drifting Stations" in the SEARCH implementation
plan Appendix 3: Elements of an Ice-Based Observatory
Science questions: The atmosphere is an important element of the Arctic climate system but there is a substantial lack of observations over the Arctic Ocean. Currently the biggest uncertainty in Arctic climate simulations are connected with limitations to the accuracy of measurements of albedo, surface fluxes and cloud cover. The International Arctic Buoy Program (IABP) provides information about surface atmospheric pressure and 2 meters air temperature with the remaining information on atmospheric conditions coming from operative numerical models and data reanalysis projects. These models are not perfect and the most probably causes for the large disagreements in Polar Regions between model results and observations are related to unrealistic parameterizations of a variety of feedbacks. Our understanding of the interactions and feedbacks among the components of the Arctic climate system can be significantly advanced by integrating new observations of Arctic climate variables with global and regional coupled atmosphere-ice-ocean models. The relationships and feedbacks between climate variables are not fixed over time and space and the ratio of thermal and dynamical drivers could change (buoyancy/convection and vertical wind shear). This establishes the need to compare the temporal evolution and spatial pattern of model relationships with the corresponding covariability in observed and measured climate variables on decadal time scales. The proposed measurements can identify physically based causes for disagreement and focus on physical processes (e.g. surface fluxes in the stable and unstable planetary boundary layer, albedo-radiation-low cloud feedbacks, the importance of synoptic-scale atmospheric dynamical processes for the regional variability of sea ice cover, the influence of Arctic aerosols, etc.). The use of different measurements, e.g. from field campaigns, like the Surface Heat Budget of the Arctic ocean (SHEBA) program or satellites, can be used to improve the accuracy of the models by evaluating the realism of their output, analyzing feedback mechanisms and relationships among climate variables but in parallel a network of drifting platforms providing sustained measurements of atmospheric surface parameters over the Arctic ice and ocean is needed. These measurements together with theoretical approaches will allow us to answer some key scientific questions, namely: • What are the physical processes within the coupled atmosphere-ocean-sea-ice system that determine the Arctic surface heat, humidity and momentum fluxes? Measurements of surface energy fluxes on time scales relevant for climate time scales and climate modeling are needed in order to resolve decadal and interdecadal variability. • What is the variability of radiative and turbulent properties of the atmosphere on climatically relevant time and space scales? Model results show that there is a reasonable representation of the annual cycle and selected climate variables with major shortcomings in the planetary boundary layer and the near surface. Therefore, atmospheric measurements from automated IBO should include basic parameters characterizing processes and fluxes at interfaces atmosphere-sea-ice and atmosphere-ocean. Correct representation of these parameters is extremely important for calculations and simulations of sea-ice and ocean dynamics and thermodynamics which respectively influence atmospheric conditions. Summarizing, the following physical characteristics of the near surface atmosphere layer is necessary to determine the surface energy budget and to answer a suite of very practical questions, such as: What are the radiative fluxes? How much radiation is incident, reflected, absorbed, and transmitted? What is the cloud cover (amount and properties)? What is the stratification and thickness of boundary layer over the ice and ocean? What are the turbulent fluxes in this layer? Recommended atmospheric parameters: • Air pressure (Paroscientific sensor); Spatial coverage over the Arctic could be similar to IABP array (with perhaps 1-2 buoys per 500 km), although a 5 to 10 times higher resolution would be desirable in some areas for comparisons with regional climate model simulations. Analysis using IABP experience and modeling capabilities should be used to determine the spatial resolution parameters and respective number of IBOs in the array. Thermodynamics (growth, decay, mass balance): General circulation models indicate that Arctic sea-ice may be a sensitive indicator of climate change. Accordingly, efforts are underway to improve and expand observing systems designed to monitor changes in the Arctic sea-ice cover. The mass balance of the ice cover is an important component of such observing systems, since it is an integrator of both the surface heat budget and the ocean heat flux. Satellites provide information on ice extent, as well as the onset of melt and freeze-up and submarine surveys furnish large-scale information on changes in ice thickness. However, neither method delineates potential sources of observed changes: e.g. differences in surface heat budget, variations in ocean heat flux, or modifications due to ice deformation. Ice mass balance data provide this critical insight. Autonomous buoys provide a means of routinely monitoring the ice mass balance at many locations. Ice mass balance buoys consist of, but are not limited to, a combination of a data logger, an Argos transmitter, a barometer, a GPS, acoustic sensors monitoring the positions of the ice surface and bottom, and a vertical string of thermistors extending from the snow surface to the ocean surface. The buoys provide time series information on vertical temperature profiles, ice growth and decay, snow accumulation and ablation, and ocean heat flux. In the past few years, nearly a dozen of these buoys have been deployed as part of the Study of Environmental Arctic Change (SEARCH) program. The ice buoys have been collocated with other instruments including ice thickness profilers and ocean and meteorological buoys. Data from these integrated sensor systems will be assimilated and synthesized with other direct observations, remote sensing data, and sea-ice models, to study the large-scale evolution of ice mass balance. Recommended parameters and sensors for sea-ice thermodynamics: • Position (GPS); Dynamics (deformations, ridging, failure): At scales of 10-300 km sea-ice consists of a collection of plates with differential motion along discontinuities. It is equivalent to the oceanographic mesoscale (10-100 km) which is rich in high energy dissipation processes (e.g., eddies). At this scale, differential sea-ice motion plays an analogous dissipative role through the development of leads, slip lines, cracks, and pressure ridges. Within the sea-ice community there is no formal definition of this scale, with nomenclature such as “linear features”, “piece-wise rigid motion”, and “aggregate scale” beginning to emerge. Researchers are only recently able to explore this scale thanks to availability of high-spatial resolution, all-weather, Synthetic Aperture Radar (SAR) images. A fundamental caveat with SAR imagery on polar orbiting satellites is limited temporal resolution (typically 3 days and rarely less than one day in cross-overs). Under the influence of fast moving storms, significant non-linear changes in discontinuities occur at temporal scales much less than 3 days with sea-ice deforming rapidly, resulting in large changes in orientation, distribution, and size of continuous and discontinuous regions. Complimentary to polar SAR imagery, ice-mounted GPS-equipped buoys have high-temporal resolution (hourly) but are spatially sparse in the field (low-spatial resolution) with episodic deployments. Our approach is the development of a high-temporal, high-spatial synthesis using buoys, SAR imagery, and a Lagrangian discrete element ice models. Such a synthesis provides valuable regional information for improving our understanding of sea-ice processes, short-term (up to one week) forecasting, and model validation. Efforts toward this goal are underway with interim results already showing great merit in both Arctic and Antarctic regions. Relevant science, logistic, and technological issues include: • With the revisit time of satellites limited to one day or longer, the temporal resolution of Lagrangian buoys (typically 1 hour) still far exceeds any space borne platforms. The addition of low-cost (< $2K) GPS buoys scattered around a base ice-tethered system provides critical information in determining local ice dynamics in a way that can not be capture by remote sensing (not now and not for a very long time to come). Their high temporal resolution (typically 1 hour) captures fundamental high energy processes like storms, tides, inertial oscillations, and sub-surface oceanic eddies manifested in the ice. Even weekly atmospheric synoptic events like storms are poorly resolved in high spatial resolution space-borne SAR imagery. • A simple scaling experiment clarifies the practical advantages of utilizing sea-ice to understand geophysical scale dynamic processes. Velocity is computed from a point measurement and associated changes of that moving point with time. Deformation is computed from spatial changes at multiple points with time. As such, deformation of any material captures both spatial and temporal characteristics while velocity captures only the temporal variability. Hence observations of sea-ice divergence and shear are far more encompassing in describing processes related to the surface fluxes and navigation while velocity is an intermediate point measurement toward that result. Relatively high spatial and temporal correlation length scales of ice (of order 100 km and months, respectively) make it possible to estimate mesoscale/regional/local deformation based on a relatively small cluster (of order 10) of point measurements. This is in contrast to the need for several hundred surface drifters to cover similar scales in the atmosphere and ocean. Hence regional sea-ice dynamics and variability measured through sea-ice deformation arrays is both easier and more cost effective than for either mesoscale atmospheric or oceanic systems; a benefit of sea-ice utilized since the time of Fridtjof Nansen over 100 years ago. • The number of GPS stations around an ice-tethered platform is more critical than the scale they are deployed. A minimum of 6 buoys is required for a statistical characterization and 10-12 are preferable in dynamic regions. In combination with high spatial resolution SAR images one can get away with 6 or so stations if used primarily as temporal tie-points to connect non-linear events between images. Spatial scales should be determined based on critical regional mesoscale processes and be deployed in clusters accordingly (5-200km). Helicopter range from a main buoy has traditionally defined the outer bound (around 200km). • The following is a recommendation (in order of cost) of practical add-ons to remote mesoscale units in terms of cost optimization and relevant data retrieval (to add on as budgets permit but not at the expense of enough cluster buoys). o Temperature sensor at the snow-ice interface; Science questions: Recent measurements in the Arctic Ocean show that "the Arctic is in the midst of change extending from the stratosphere to below 1000 m in the ocean" (Morison, J.H., K. Aagaard, and M. Steele, Arctic, 53: 359-371, 2000). Such changes resonate with global climate modelling studies that consistently show the Arctic to be one of the most sensitive regions to climate change. In turn, processes occurring in the Arctic Ocean appear able to influence the subpolar North Atlantic and possibly the global ocean circulation. There are numerous science questions related to the Arctic Ocean circulation, freshwater and heat contents, vertical structures, water masses and other physical parameters and their variability. It is also important to understand the role of small to mesoscale processes such as turbulent mixing near the air-ice-ocean interface, double diffusion (pervasive in the Atlantic Water core), internal wave mixing, and mesoscale eddies. Among these problems the following questions are likely to be resolved with data from the implementation of IBOs: • What is the current state of the Arctic Ocean hydrography? A coordinated effort of sample collection and data synthesis is
needed to solve these questions. The data collection effort proposed
here will fill crucial gaps in the modern and historical data sets
available in the Arctic Ocean. It is important to: • Quantify the vertical and temporal scales of variability in the temperature and salinity fields, especially in the Pacific and Atlantic halocline layers where many dramatic changes have occurred during the past decade. • Assess the impact of regional effects on large-scale changes in the circulation and properties of the Arctic Ocean. Parameters and sensors and real time profiling technology: There are four measurable parameters traditionally used by physical oceanographers for their studies (water temperature, salinity, pressure, and ocean currents) and there are proven means for their sampling. Progress in documenting and understanding climate variability of the Arctic Ocean requires a sustained ocean observing system that is cost effective and practical. The need for broad-scale, frequent ocean sampling is being addressed outside the polar latitudes by the multinational Jason/Argo programs that are providing satellite altimeter measurements of sea level anomalies and drifting profiling floats measurements of the upper ocean temperature and salinity fields, all feeding a global data assimilation effort (GODAE). Although sea-ice precludes the use of these techniques for observing the Arctic Ocean and quantifying its circulation, it does provide a natural support platform for the deployment of ocean sampling systems. Ice-tethered drifters discussed in the introduction with discrete subsurface instrumentation such as the SALARGOS, IOEB and J-CAD buoys, have been successfully deployed in the Arctic in recent years, demonstrating that automated buoys are a viable means of acquiring long-term, in situ data from beneath the ice pack. Development of automated profiling instruments is required to overcome the limitations of discrete depth systems (for examples see abstracts in Appendix 5 by Krishfield and Toole and Kikuchi, et al.). For climate variability studies, arrays of platforms are needed to better resolve the spatial and temporal variability of the data from individual drifters. Year round observations with daily or more frequent temporal resolution and better than 1 meter vertical resolution of the upper 500-800 meters would allow polar oceanographers not only to successfully detect the heat and freshwater content of the Arctic Ocean but also to investigate and better parameterize numerous polar ocean processes including vertical mixing within thermohaline diffusive staircases and lateral stirring by thermohaline intrusions and eddies. Additionally, an IBO array could establish a telecommunications link through the surface ice pack to serve as a future framework for two-way transmissions of data and/or navigation information among buoys, AUVs, and subsurface moorings measuring physical properties in the Arctic Ocean. Recommended parameters for physical oceanographic studies (all profiling from the surface to at least 500 m with 1 m resolution): • Pressure; The identification of a small subset of key variables for biology and chemistry is relatively difficult because of the diverse and broad range of critical variables relevant to various aspects of Arctic ecology, chemistry, and biochemical transformations. The important variables, naturally, depend on the biological and chemical question to be addressed. Therefore, it is important to recognize that multiple combinations of biological and chemical sensors may be considered to be critical. Important Questions: Two overarching, critical questions that remain unanswered given the spatial and temporal paucity of data were identified, namely: • How do biological and chemical parameters vary seasonally and inter-annually? • What is going on, biologically and chemically, during winter? Encompassed within both of these questions are more specific processes or feature oriented questions that remain critical to our understanding of the ecosystem and of material fluxes. The following serve as examples of important questions but are not perceived as all inclusive. • What are the budgets of key biological and chemical parameters under the ice? • What is the extent and heterogeneity of ice cover and open water and how does this heterogeneity impact light transmission, light quality, and under ice production? • What is the vertical distribution of key bio-chemical parameters especially relative to hydrography? • What governs the interplay between Pacific and Atlantic waters, their extent and the location of fronts? How do they impact Arctic Ocean circulation and outflow and how do they influence Arctic biology and chemistry? How do Atlantic and Pacific waters meet and circulate to form the Arctic Ocean and what is the impact of this circulation and outflow on Arctic biology and chemistry? • What is a signal of change? What biological or chemical characteristics might change in a manner analogous to the recent temperature changes observed in the Atlantic layer of the Arctic Ocean? • How will changes in ice cover affect the exchange of greenhouse gases (CO2, CH4) with the atmosphere? • How will changes in sea-ice cover affect biological communities and biological and chemical (gases) fluxes? • How will changes in circulation affect biology and chemistry? For example, what is the impact of hydrographic features on particle transport? It is critical also to measure the biological and chemical variables at the same spatial and temporal scales as physical variables. Biological and chemical characteristics change both through transformations and processes within and between reservoirs or trophic levels and through advection and mixing by physical processes. Thus some variability in spatial and temporal distributions directly correlates with physical changes. In order to separate out the internal (biological and /or chemical transformations) from the external (physical) mechanisms, measurements of all variables must be conducted at the same spatial and temporal scales. Some key parameters that could serve as “state variables” or as a “state vector” for the biological and chemical systems were discussed, however, it was recognized that the overall complexity of the systems made identification of a subset of critical factors difficult. Important variables or parameters that could be measured include photosynthetically available radiation (PAR), nutrients, organic and inorganic carbon, p CO2, dissolved oxygen, turbidity, particle counts, fluorescence, and active and passive acoustics. Recommended minimum parameters and sensors for biological and chemical/geochemical studies: • Nutrients (NO3 , Si(OH)4 and PO4); Additional measurements that could be added in the near-future based on sensor development and energy management included pH, inorganic carbon, genetic analysis using microarrays, and methane. A broader suite of measurements that would greatly expand our understanding of the biological and chemical systems includes additional or parallel measurements in the near surface atmosphere layer, on the sea-ice surface, in sea-ice, beneath sea-ice at its bottom surface, and in the water column. It was recognized that not all of the measurements could be conducted easily, based on existing technology, and that many would require some additional instrument and power management development. Furthermore, many of these measurements were specific to the scientific questions posed by individual or teams of investigators. Future systems may incorporate subsets of these measurements depending on the particular scientific goals of each effort. The broad suite of measurements was grouped into those from the atmosphere and just above the ice, within the ice, and in the water below. Parameters to be measured in the atmosphere, above ice: • These parameters include biologically important production
of chemically relevant gases (e.g., CO2, O2, DMS, halogens, methane)
at different heights above the ice surface; Parameters to be measured within sea-ice: • Fluorescence profiles; Parameters to be measured in the water column (all sensors should be vertically profiling): • PAR; Parameters to be measured at selected depths
in the water column: Missing from the suite of measurements proposed was serious consideration of the benthos (likely because of the scientific makeup of the group). The benthos may best be served by AUVs that are deployed from ice tethered platforms. Some parameters important to benthic ecology include topography, megafaunal distribution and abundance, sediment chemistry and chlorophyll concentration, and meiofaunal distribution and abundance. The importance of obtaining vertical profiles in the upper water column was emphasized. In order to resolve the diel signals in parameters such as production, water chemistry, and plankton distribution, profiles should be conducted every 6 hours at minimum. This requires substantial power. A compromise would be to profile once every 30 hours, thus obtaining a complete “diel” cycle every 4 days. Geochemical tracers are widely recognized as an invaluable tool in modern oceanography. Combined with measurements of temperature and salinity, geochemical tracers provide information about ocean circulation and mixing processes that could not be derived from physical measurements alone. In the Arctic, a suite of conservative and quasi-conservative tracers -- including nutrients (N, P, Si, alkalinity), oxygen isotopes (d18O), and trace metals (e.g., Ba) – has been used to characterize water masses, define their boundaries, and quantify contributions from freshwater sources (i.e. sea-ice melt versus runoff from North American and Eurasian rivers) and marine waters of Atlantic and Pacific origin. Historically, geochemical tracer data have primarily been obtained by chemical analyses of water samples in a ship-based or land-based laboratory. A new class of instruments is emerging that can be deployed on autonomous oceanographic platforms or vehicles and measure geochemical species in situ. These types of sensors typically utilize a combination of optical measurements, onboard chemistry, and/or micro-to-nano scale machining to carry out their analyses. Ice-Based Observatories (IBOs) have the potential to expand our database for the Arctic far beyond that which would be logistically and economically feasible using conventional sampling techniques. It will be desirable to equip IBOs with an array of autonomous, in situ sensors capable of measuring geochemical parameters. Currently available sensors are typically based on optical and/or electrochemical measurements (e.g., salinity, light transmission/scattering, fluorescence, dissolved oxygen, pH, p CO2, etc.). Sensors have also been developed that incorporate inline reaction chemistry to quantify chemical species, such as NO3 (Johnson and Coletti, Deep Sea Research I, 49, 1291-1305, 2002). A new class of instruments is emerging that utilize a combination of optical measurements, onboard chemistry, and micro-to-nano scale machining to carry out their analyses (i.e., lab-on-a-chip). These microfluidic systems consume small amounts of sample, reagents and power and have great potential to be adapted to geochemical measurements currently performed by large, laboratory-based instruments (e.g., DIC/alkalinity, DOC, PIC, POC, metals, nutrients, etc.). Advances in materials and technology will also likely lead to sophisticated devices for complex analyses (e.g., bacteria/plankton counters, DNA/RNA sequencers, etc.). While sensor arrays on initial deployments of IBOs will likely be focused on basic, established sensors, it is also very important to aggressively pursue next-generation sensors for integration with the IBOs in the short to medium term future – i.e., 3-5 years. Priority should be given to sensors for determining the budgets of key biogeochemical parameters (e.g., organic/inorganic C, N, P, Si, etc.). Priority should also be given to developing sensors for chemical species that can be applied to multi-element tracer analyses to investigate mixing and circulation (e.g., oxygen isotopes, nutrients, Ba, etc.). Including the development and deployment of geochemical sensors as a high-priority objective of the overall IBO science program will greatly enhance the fundamental physical measurements and make the resulting data sets much more broadly applicable to Arctic system science. In addition to profiling instruments it is important that discrete samples are collected to corroborate and calibrate profiling sensors as well as to provide flux data. Water samples and sediment traps may be deployed on separate moorings to perform these tasks. Sediment traps have been deployed in the Canada Basin in the past with success and water column samplers have been tested in the Bering Sea with limited success. Further field tests are required to take advantage of past experiences and demonstrate the value of these measurements. The water column sampler in particular will enable the collection of samples for laboratory analysis of several tracers that currently cannot be analyzed using profiler sensors (e.g. d18O, barium, dissolved organic carbon). Appendix 4: A vision
for interaction of autonomous and Lagrangian platforms with Ice-Based
Observatories
Under-ice autonomous vehicles (both propeller driven and gliding)
and subsurface Lagrangian floats rely on a nested system of acoustic
communication and navigation for interaction with ice tethered platforms.
At the basin scale, a relatively small number of bottom moored,
large, low-frequency (20 - 50 Hz) sound sources are used to ensonify
the entire basin, broadcasting navigation signals at fixed, several
times-per-day time intervals. Vehicles and floats listen for these
signals using small, lightweight hydrophones. Ideally, sources are
placed so that mobile platforms are always in range of at least
three sources for unambiguous position resolution. Basin scale propagation
ranges in the Arctic at these low frequencies have been demonstrated,
though commercial sources are not regularly produced. RAFOS-style
navigation with circular or hyperbolic tracking is a well proven
technology. The three tiered system just described allows for significant flexibility in the operation of mobile platforms under permanent ice cover. Unmodified floats that rely on a chance surfacing in a lead as their best hope for data offload rely on the low frequency system for positioning and could use the high frequency system to improve reliability statistics with chance offloads to other mobile platforms or IBOs. Gliding AUVs could occupy long term sections, using low frequency navigation signals and diversion to nearby IBOs for telemetry as they come into range. They could also morph between float and glider mode, operating as a Lagrangian profiling float until they hear the intermediate frequency homing signal and navigate to an IBO. Propeller driven AUVs could act as rovers around a single IBO, with a survey radius of O(100 km), using all three systems for navigation and communication with the IBO essentially acting as a mothership. With suitable coverage, propeller driven or gliding AUVs could deliberately move from one IBO to another. The low frequency system, perhaps augmented by intermediate sources of opportunity, could be used by large AUVs for basin scale transects and smaller AUVs employed in localized process studies. Within the context of acoustic communication and navigation systems, it is important to note that underwater sound is increasingly an environment concern. Therefore an assessment of the environmental impact of an underwater sound communication and navigation system has to be made in phase with the technical developments. Appendix 5: Abstracts of Workshop Presentations
Scientific Questions and Measurements
Required for Arctic Ocean Studies The Arctic Ocean's role in global climate - while now widely appreciated - remains poorly understood. Knowledge gaps of key process (e.g. freshwater storage and release, shelf-basin exchange, mid-depth and deep water formation, sill and strait exchanges fast-ice processes) will continue to block our understanding (and reliable model development) until appropriate and practical observational and monitoring programs are put into place. Further, it is not acceptable to remain within the confines of a single discipline; advances in understanding the physical environment must be linked to biota. And while moving ahead in data acquisition (by application of both existing and new technologies) we must always ask: are we addressing the most important problems; are we forgetting something? Atmospheric measurements as a prerequisite
for modeling the Arctic climate system The earth's climate is largely determined by the spatial structure of large-scale atmospheric circulation patterns and their associated temporal changes. Climate variations on seasonal and decadal time scales are influenced by externally and anthropogenically caused climate variability as well as by the global dynamics of preferred oscillation modes of the coupled atmosphere-ocean-sea-ice system. Regional feedback mechanisms in the Arctic climate system within the coupled atmosphere, ocean and sea-ice and land system have additionally the potential to influence the global climate. The maximum temperature increase in IPCC coupled model projections at the end of this century is in the central Arctic Ocean, whereas the observations show the high latitude temperature increase over the continents. With these uncertainties the Arctic poses severe challenges to generate credible model-based projections of climate change. There is a need to understand the influence of large-scale dynamic variability connected with the natural circulation modes of the global climate system and the regional feedbacks involved in the complex Arctic atmosphere-sea-ice-ocean-land interactions. In the EU project GLIMPSE we address the deficiences in our understanding of the Arctic by developing improved physical descriptions, understanding and parameterizations of regional Arctic climate feedbacks in atmospheric regional climate models and coupled atmosphere-ocean-sea-ice regional climate models with high horizontal and vertical resolution on the basis of data from the Surface Heat Budget of the Arctic Ocean - SHEBA project. For the first time in the Arctic Regional Climate Model Intercomparison Project - ARCMIP seven different Arctic regional climate models have been compared and shown that there is a pronounced intermodel scatter. The improved parameterizations from regional models of the Arctic will be implemented into state-of-the-art coupled Atmosphere-Ocean General Circulation Models, to determine and understand their global influences and consequences for Arctic climate feedbacks and decadal-scale climate variations. The regional atmospheric model HIRHAM has been applied for simulations of the Arctic climate in a pan-Arctic integration domain. Arctic climate changes associated with large-scale atmospheric circulation changes as well as with land surface and aerosol cloud processes have been studied in detail. The importance of increased vertical and horizontal resolution has been investigated. The atmosphere-sea-ice interaction has been investigated in the coupled atmosphere-ocean-sea-ice model HIRHAM-MOM of the Arctic. Observed features of the atmospheric circulation and the sea-ice concentration patterns during spring to early summer over the Arctic Ocean are reproduced.
In 1998 and 1999, NSF sponsored deployment of the Seafloor Characterization and Mapping Pods (SCAMP) aboard a SCICEX submarine to map Arctic Basin topography. A recently discovered byproduct of mounting a 12 kHz interferometric sonar on the hull of the USS Hawkbill is that in addition to mapping seafloor topography, SCAMP also mapped the base of the arctic ice canopy [Edwards et al., 2003]. During standard topographic processing of SCAMP data, coherent signals were observed in "water column data," i.e., those data collected between the outgoing sonar pulse and the first returned bottom echoes. Processing was modified to produce swath maps of the information collected from the beginning of ping transmission until seafloor echoes were detected. The resulting images show different returns on the port and starboard sides of the submarine and individual features that can be traced from one side of the swath to the other. Unexpectedly, SCAMP had collected the first wide-swath (~2-6 km) images of keels and leads along the base of the arctic ice canopy. The raw SCAMP phase data are coherent prior to seafloor detection suggesting that interferometric approaches could be used to generate maps of ice keel depths; however, the signal-to-noise ratio of these data are too low for this purpose. Nevertheless, this discovery provides a unique opportunity to explore the concept of using a low frequency, platform-mounted upward-looking interferometric sonar to create wide swath maps depicting the shape and texture of the base of the arctic ice canopy. Plans and progress towards an hybrid Arctic
float observation system (HAFOS) The Argo system of vertically profiling floats is expected to become the backbone of a global ocean observing system. However, it can not be easily extended into the Arctic Ocean, since the floats have to get to the sea surface to be located and to transmit the measured data. Since location and data transmission under the ice is presently only possible by acoustic means, an observation system of water mass properties and currents in the deep Arctic or Antarctic Ocean requires the combination of different technologies. It comprises ice resistant profiling subsurface floats, surface drifters on the ice and moored stations. The envisioned system consist of RAFOS (ranging and fixing of sound) type subsurface profiling floats which obtain their position by ranging of sound sources on moored stations. The float measures vertical profiles of temperature and conductivity/salinity, but it does not reach the surface if it floats under the ice. Therefore it has to stores the data until it reaches an ice free area. In this first version no real time data can obtained and the data are lost, if the float does not reach open water again. Therefore a second step is planned to install a sound source on the float (SOFAR). During the period when the float profiles under the ice it transmits a reduced data set acoustically, since the energy consumption for sound transmission is the limiting factor of the system. The full data set is stored until the floats can reach the surface in open water. Receivers are mounted on the moorings with the sound sources for ranging which can be under a seasonally varying or even permanent sea-ice cover and on a surface stations deployed as buoys drifting on the sea-ice. From the sea-ice buoys data can be transmitted to satellites to be available in real time. The development of HAFOS is planned to take 10 years. The first steps were successful to deploy floats which will not return to the surface under ice cover and to determine the acoustic range in ice covered areas by use of RAFOS floats.
Efforts toward a high-spatial high-temporal synthesis of
sea-ice kinematics and dynamics using surface drifters, SAR imagery,
and a Lagrangian discrete element model At scales of 10-300 km sea-ice consists of a collection of plates with differential motion along discontinuities. It is equivalent to the oceanographic mesoscale (10-100 km) which is rich in high energy dissipation processes (e.g., eddies). At this scale, differential sea-ice motion plays an analogous dissipative role through the development of leads, slip lines, cracks, and pressure ridges. Within the sea-ice community there is no formal definition of this scale, with nomenclature such as “linear kinematic features” (LKFs), “piece-wise rigid motion”, and “aggregate scale” beginning to emerge. Researchers are only recently able to explore this scale thanks to availability of high-spatial resolution, all-weather, Synthetic Aperture Radar (SAR) images. A fundamental caveat with SAR imagery on polar orbiting satellites is limited temporal resolution (typically 3 days). Under the influence of fast moving storms, significant non-linear changes in discontinuities occur a t temporal scales much less than 3 days with sea-ice deforming rapidly, resulting in large changes in orientation, distribution, and size of continuous and discontinuous regions. Complimentary to polar SAR imagery, ice-mounted GPS-equipped buoys have high-temporal resolution (hourly) but are spatially sparse in the field (low-spatial resolution) with episodic deployments. Our approach is the development of a high-temporal, high-spatial synthesis using buoys, SAR imagery, and a Lagrangian discrete element ice model. Such a synthesis provides valuable regional information for improving our understanding of sea-ice processes, short-term (up to one week) forecasting for navigation, and model validation. Efforts toward this goal are presented with interim results provided from both Arctic and Antarctic regions. Geochemical tracers of the freshwater
component of Arctic Ocean circulation Geochemical tracers are widely recognized as an invaluable tool in modern oceanography. Combined with measurements of temperature and salinity, geochemical tracers provide information about ocean circulation and mixing processes that could not be derived from physical measurements alone. In the Arctic, a suite of conservative and quasi-conservative tracers -- including nutrients (N, P, Si, alkalinity), oxygen isotopes (?18O), and trace metals (e.g., Ba) – has been used to characterize water masses, define their boundaries, and quantify contributions from freshwater sources (sea-ice melt and runoff from North American and Eurasian rivers) and marine waters of Atlantic and Pacific origin. Historically, geochemical tracer data have primarily been obtained by chemical analyses of water samples in a ship-based or land-based laboratory. A new class of instruments is emerging that can be deployed on autonomous oceanographic platforms or vehicles and measure geochemical species in situ. These types of sensors typically utilize a combination of optical measurements, onboard chemistry, and/or micro-to-nano scale machining to carry out their analyses. The potential for deployment of autonomous, in situ geochemical sensors in the Arctic environment will be discussed. International Arctic Buoy Program (IABP) The Arctic has undergone dramatic changes in weather, climate and environment. It should be noted that many of these changes were first observed and studied using data from the International Arctic Buoy Program (IABP). For example, IABP data were fundamental to Walsh et al. (1996) showing that atmospheric pressure has decreased, Rigor et al. (2000) showing that air temperatures have increased, and to Proshutinsky and Johnson (1997); Steele and Boyd, (1998); Kwok, (2000); and Rigor et al. (2002) showing that the clockwise circulation of sea-ice and the ocean has weakened. All these results relied heavily on data from the IABP. In addition to supporting these studies of climate change, the IABP observations are also used to forecast weather and ice conditions, validate satellite retrievals of environmental variables, to force, validate and initialize numerical models. Over 350 papers have been written using data from the IABP. The observations and datasets of the IABP data are one of the cornerstones for environmental forecasting and research in the Arctic. An observation system for small scale
sea-ice dynamics Sea-ice deformation is characterized by narrow zones of failure between rigid aggregates of ice, and displays semi-diurnal fluctuations through the polar region at all times of the year. Observing and modeling efforts show that generally this oscillation is driven by inertial motion in the ocean. It is unknown how tides effect the deformation, and how tidal and inertial forcing interact with the material properties of the ice to create large scale oscillating linear failure zones. Field studies to date document the existence of these features. A greater variety of in-situ case studies are required to understand the role of tides, inertial motion, wind stress, boundaries and material properties of the ice on high frequency sea-ice deformation. Modeling and observation studies show that high frequency motion affects the mass balance of sea-ice. We plan a set of meso-scale ice deformation monitoring stations, in conjunction with measurements of the thermodynamic properties of the sea-ice. This will lead to a better understanding of the role of high frequency sea-ice deformation on the mass balance of sea-ice. Development and deployment plan of Argo
type buoy in the Arctic Ocean Based on JCAD (JAMSTEC Compact Arctic Drifter) successful performance, JAMSTEC and METOCEAN Data Systems are collaborating in the development of a new buoy system tethering an Argo type subsurface CTD profiler. The buoy system consists mainly of an Ice Platform and a Subsurface CTD vertical profiler. The Ice Platform is similar to JCAD; it contains the system controller, meteorological sensors, GPS and telemetry system. The vertical profiling system is based on an Argo float and samples salinity, temperature, and depth from below sea-ice down to 1000m. The vertical profiling system communicates with the Ice Platform via an inductive system similar to JCAD. Being part of the North Pole Environmental Observatory (NPEO) since 2000 gave us many buoy deployment opportunities. The data from all JCAD deployed in the NPEO project clearly illustrate oceanographic condition of the upper ocean in the early 2000. We will continue taking part in the NPEO observation us ing the new buoy system to monitor oceanographic condition in the Transpolar Drift area. We are already in the planning phase for the deployments on the 2005 POLARSTERN cruise. The POLARSTERN (AWI research vessel) allows access to the upstream region of the Transpolar Drift area which otherwise would be very difficult to realize. The buoy data will be distributed to not only the Arctic scientists but also the Argo community to understand global climate change. Non-invasive, Highly Resolved Observations
of Sea-ice Biomass Dynamics: A Link Between Biogeochemistry and
Climate Climatic changes in high latitudes sensitively affect the persistence and dynamic of sea-ice. Covering around 12 million square km, sea-ice constitutes an ecologically important, transient interface between the atmosphere and the polar ocean. The build up of autotrophic biomass inside sea-ice commences early in the season in response to the availability of light and nutrients, at a time when productivity in the water is typically low. Its release constitutes a concentrated pulse of energy to winter starved organisms and increases the vertical organic carbon flux. Sea-ice primary productivity estimates range between 30% and 50% of the Arctic marine primary production. Biomass estimates are, however, based on invasive, scattered ice-core observations of low vertically resolution in particular across the ice water interface. A thin pronounced layer of algae at the sea-ice-water interface spatially occurs where fluctuations of sea-ice mass, energy transfer and phase transitions are greatest. Due to the extremely transient nature of the ice water interface, highly temporally resolved data are needed to assess the significance of event-driven export processes from the ice. The vulnerability of sea-ice biomass to temperature anomalies is amplified by melt-water runoff and exposure to the water column. Pelagic populations of grazers respond sensitively to the timing, availability and distribution of food, such as algae micro-layers at the bottom of the ice. Current field methods lack the resolution to understand the causal relations of short-term sea-ice export events and resulting population fluctuations. Sediment traps allow integrated information over time and water volumes but do not reflect ambient food concentrations at the ice water interface and hence lack the sensitivity to resolve event driven deviations from annual means, which matter in the survival of species. We describe the seasonal in situ evolution of autotrophic biomass along highly spatially resolved vertical profiles in and across the ice water-interface, by means of a new in situ fluorescence system inside fast-ice of the Chukchi Sea during a 7 month deployment. Algae growth commenced very early (January) with distinct colonization patterns leading to a biomass peak at the end of April and export to the water. Our in situ system illustrates the advantages of a non-intrusive approach in describing the response of biomass to climatic disturbances at the ice-water interface. These achievements lay the foundation of an autonomous biological sea-ice buoy information system which integrates with existing Arctic climatic and physical sea-ice recording systems allowing a investigation of feedback mechanisms between Arctic climate, marine food webs, and biogeochemical fluxes directly below sea-ice. Eulerian approach to the ice drift measurements
in the Arctic The proposed Eulerian approach to the ice thickness and drift measurements in the Arctic is based on mechanical concept of flexible rope equipped with pressure sensors along its body. The flexible rope is a snake-like floater, which by buoyancy is pressed up to the moving drift ice. Its head is pulled down to a deep not reached by the deepest ice keels. It can provide Eulerian measurements of ice drift and other upper ocean physical parameters when it is fixed to the bottom below drifting ice. Time series of data from pressure sensors along its body and a built in compass provide estimates of ice thickness and drift (velocity and direction). This works since the pressure sensors have to pass over irregularities of the bottom of sea-ice. The time series of pressure data from the array of pressure sensors along the snake will exhibit a temporal pattern shift from which ice drift can be calculated. These measuring ropes were successfully tested in a water tank. Experiments with different rope tissues frozen into the sea-ice were also fulfilled. The results of these investigations show that this approach truly assess the ice thickness and drift and might be a first direct instrumentation applied for the Arctic pack ice drift measurements. Deployed for a long time periods in the Arctic, this approach would be able to supply data missed by an IBO array. Ice-Tethered Instruments: History and
Future Development Progress in documenting and understanding climate variability of the Arctic Ocean requires a sustained ocean observing system that is cost effective and practical. Ice-tethered drifters discrete subsurface instrumentation such as the SALARGOS, IOEB and J-CAD buoys, have been successfully fielded in the Arctic in recent years, demonstrating that automated buoys are a viable means of acquiring long-term, in situ data from beneath the ice pack. Development of automated profiling instruments is required to overcome the limitations of discrete depth systems. For climate variability studies, arrays of platforms are needed to better account for the spatial and temporal variability of the data from individual drifters. Building on the successful Moored Profiler (MP) technology, WHOI recently completed development and field test of an automated, long-lived, ice-tethered profiler capable of returning daily high-vertical-resolution profiles of temperature and salinity in the upper 500-800 m of the Arctic Ocean over a 3-year lifetime. The buoy transmits all data in near-real time and is low-cost, allowing systems to be considered expendable. Ultimately, it is envisioned a loose array of these expendable Ice-Tethered Profilers (ITP's) repeatedly sampling the upper ocean below the perennial ice pack and telemetering the data back in real time to the lab. Long lifetime and modest cost will permit basin-scale coverage (20-30 systems) to be maintained through regular seeding of replacement systems as necessary, similar to the IABP buoys. The significance of the proposed system can not be overstated. Operationally, an array of ITPs will serve as the Arctic analogue of the Argo float program and in combination with this program will extend routine hydrographic coverage of the world ocean from 60-70N all the way to 90N. Additionally, an ITP array could establish a telecommunications link through the surface ice pack to serve as a future backbone for two-way transmissions to buoys, AUVs, and subsurface moorings in the Arctic Ocean. An Observational Array for High-Resolution,
Year-Round Measurements of Volume, Freshwater and Ice Flux Variability
in the Davis Strait An array consisting of moorings, bottom mounted instrumentation and autonomous vehicles will be deployed across Davis Strait to study exchange between the Arctic and the North Atlantic Oceans. The system employs complementary techniques, combining mature technologies with recent developments in autonomous gliders to address all aspects of flow through Davis Strait, including some measurements that have not previously been technologically feasible. The components of the system include: A sparse array of subsurface moorings, each instrumented with an upward looking sonar, an Acoustic Doppler Current Profiler (ADCP), conductivity-temperature (CT) sensor and conventional current meters, will provide time series of upper ocean currents, ice velocity and ice thickness. These measurements will be used to estimate the ice component of freshwater flux, provide an absolute velocity reference for glider-derived geostrophic shears and derive error estimates for low-frequency flux calculations. Bottom mounted instruments, including ADCPs and CT sensors, will be deployed across the Baffin and Greenland shelves to quantify variability associated with strong, narrow coastal flows. An experimental, quasi-expendable CT sensor will attempt to measure near-surface (20-30 m) water properties. Acoustically navigated Seagliders will provide year-round, repeated, high-resolution hydrographic sections across the Strait. Glider profiles will extend from the seafloor to the surface or ice bottom, capturing the critical (but ice-threatened) upper ocean. The resulting sections will be combined with the moored array data to produce sections of absolute geostrophic velocity and to estimate volume and freshwater fluxes. Glider development, including integration of a 780 Hz acoustic navigation system, represents a major, ongoing component of this effort. During the first year, we will also conduct a small, year-long acoustics experiment designed to investigate attenuation at 780 Hz as a function of stratification and ice cover. MEMS/NEMS sensors for Arctic Observing
Platforms Recent advances in fabrication technology and techniques have opened the possibility for a new generation of micro/nano sensors with a wide range of applications. The advantages of MEMS/NEMS devices are often faster response time, lower energy consumption, higher sensitivity, lower cost, lower volume, lower weight, among others. Automation of these sensors could also open new directions in monitoring chemical, biological, and physical agents in arctic environment. Current status of MEMS/NEMS sensors suitable for arctic monitoring will be reviewed and the potential for integrating these sensors into, e.g., AUVs will be discussed. New sensing and their delivery capabilities have been developed at the University of Colorado at Boulder. These includes: Colorado Micro Aerial Vehicles (CMAVs), low speed maneuvering of Unmanned Underwater Vehicles (UUVs), and MEMS chemical sensors. CMAV: CMAV is a light and flexible aerial vehicle with special capabilities. MAVs are very light and can often carry a small payload such as MEMS sensors or CMOS cameras for imaging. The first generation of such vehicles in Colorado was designed, built and tested in our group. Such vehicles can potentially operate as a mobile network for sensory missions. CMAV can be launched using a catapult mechanism. Consequently, it does not require a runway. Many scenarios for applications of such vehicles in polar regions have been considered. UUVs: Control of Torpedo-shaped UUVs and AUVs (eg. REMUS) are often achieved by the application of control surfaces. Since the force on such control surfaces are proportional to the vehicle velocity, such vehicles perform poorly at low speed. as a result, docking is often a major issue in UUVs and AUVs operation. A novel low speed maneuvering technique for UUVs is offered where compact vortex generators are used to control small UUVs at low speed where the control surfaces are not very effective. The actuator's design is based on squid locomotion and formation of optimal vortex rings with maximum thrust generation. This capability was demonstrated on a Colorado UUV. MEMS Sensors: Some of the new chemical sensing techniques in liquid
or gas media were reviewed. Preliminary results from electrowetting
at micro-scales were presented, where a liquid droplet could be
manipulated using electrostatic actuations. Such a capability could
remove the need for micro pumping, valving, and mixing required
for many micro chemical sensors. Transverse flow of an inhomogeneous current produces fluctuations of the acoustic signal passing through it. These fluctuations vary with signal frequency due to variation of the Fresnel zone linear size. When the ocean inhomogeneous are smaller then the transverse dimension of overlapping Fresnel zone, the fluctuations of the signal at two different frequencies are coherent in a low-frequency range of the spectrum and non-coherent in the high-frequency band. The cutoff frequency of the coherence function of two continuous-wave-frequency-separated signals is therefore a quantitative indicator of transverse current velocity. The longitudinal component of current can be measured by differencing the travel times of signals traveling in opposite directions, and as a result the current velocity can be obtained. This technique provides the basis for a method of ocean current monitoring that can be considered as a "frequency-domain" version of the conventional scintillation approach to the current velocity measurements that is based on the measurement of the signal correlation transmitted from the source to the two separated receivers (space-domain scintillation). This technique is applicable to scales on the order of 3-10s of kilometers. If source-receiver pairs are deployed on solid ice or buoys the potential exists for continuously monitoring the evolution of the fine scale current structure of the entire water column in a horizontal plane. The proposed equipment would be inexpensive, disposable, and suitable for Arctic conditions. The technique may provide significant advantages over CTD soundings similar to the way in which wind profilers have advantages over rawinsonde measurements in the atmosphere. Autonomous Ice Mass Balance Buoys General circulation models indicate that Arctic sea-ice may be a sensitive indicator of climate change. Accordingly, efforts are underway to improve and expand observing systems designed to monitor changes in the Arctic sea-ice cover. The mass balance of the ice cover is an important component of such observing systems, since it is an integrator of both the surface heat budget and the ocean heat flux. Satellites provide information on ice extent, as well as the onset of melt and freezeup and submarine surveys furnish large-scale information on changes in ice thickness. However, neither method delineates potential sources of observed changes: e.g. differences in surface heat budget, variations in ocean heat flux, or modifications due to ice deformation. Ice mass balance data provide this critical insight. Autonomous buoys provide a means of routinely monitoring the ice mass balance at many locations. Ice mass balance buoys consist of a combination of a data logger, an Argos transmitter, a barometer, a GPS, acoustic sensors monitoring the positions of the ice surface and bottom, and a vertical string of thermistors. The buoys provide time series information on vertical temperature profiles, ice growth and decay, snow accumulation and ablation, and ocean heat flux. In the past few years, nearly a dozen of these buoys have been deployed as part of the Study of Environmental Arctic Change (SEARCH) program. The ice buoys have been collocated with other instruments including ice thickness profilers and ocean and meteorological buoys. Data from these integrated sensor systems will be assimilated and synthesized with other direct observations, remote sensing data, and sea-ice models, to study the large-scale evolution of ice mass balance. Rapid Profiling of Ocean Velocity and
Acoustic Scattering Strength in the Arctic The vorticity field of the Arctic ocean is strangely quantized, with values near zero and near being most common. The highly rotational motions are associated with coherent vortices, whose genesis remains somewhat of a mystery. Any long-term survey of the Arctic must include the vorticity field. A census of theeddies and a series of process experiments which lead to an understanding of vorticity quantization must play a central roll. Given the short inertial day in the Arctic and the tendency of eddies to attract (refract) inertial waves, traditional (mid-latitude) sampling rates of 4-8 per day are too slow for proper eddy monitoring. A mix of in-situ and acoustic Doppler approaches is advised. A critical acoustic "by-product" is the scattering strength signal, which is revealing much about the biological communities of the upper Arctic Ocean. Upper Ocean Observations from Ice Anchored
Buoys Ice-Ocean Environmental Buoys (IOEBs) are special-purpose platforms designed for long-term measurement of meteorological and oceanographic variables in the Arctic. IOEBs include instrumentation below the ice and are designed to be recovered. Between 1992 and 1998, three IOEBs were deployed a total of six times on multiyear pack ice in the Arctic. Acoustic Doppler Current Profilers (ADCPs) on the IOEBs provided observations of velocity in the western Arctic pycnocline (25-300 m depth) that were used to investigate the distribution and properties of subsurface eddies. Forty-four months of data were available from three IOEB deployments within the Beaufort Gyre between 1992 and 1998. The majority of eddy center depths were between 50 and 150 m and the mean thickness was 126 m. Thus, eddies were found predominantly within the cold halocline. Maximum rotation speeds were typically 20-30 cm/s. Faster rotation was associated with larger radius and larger vertical extent. Typical radii were 3-6 km. The sense of rotation was predominantly anticyclonic. Eddies in the Canadian Basin tended to be larger, deeper and more rapidly rotating than those over the Chukchi Plateau. An Energy Conserving Oceanographic Profiler
For Use Under Mobile Ice Cover; ICYCLER ICYCLER is a moored oceanographic profiler designed to measure surface layer water properties under mobile ice cover. The profiler can provide daily 50 meter salinity-temperature-chlorophyll profiles for a full year. Data are collected during each profiling ascent with an instrumented float that avoids ice impact using an onboard echo sounder. Once measurements are acquired, the sensors are hauled back down to an ice-free depth. An efficient energy-conserving mechanical design minimizes power requirements to allow for autonomous operation using a logistically manageable and hydrodynamically efficient package. An ICYCLER prototype was successfully used in the Canadian Arctic Archipelago for a year-long deployment and a second re-designed ICYCLER is being tested for Arctic deployment in the summer of 2004. Seasonal variation of halocline circulation
in the East Greenland Current We present results from five years of year-round temperature, salinity and current observations in a mooring line in the Fram Strait (79°N). Instruments in the upper layer (about 60 m depth) in the East Greenland Current show a pronounced seasonality both in temperature and salinity. The temperature varies between the freezing point and –1°C and the salinity range is from 32.3 to 34. The parameters are, however, not exactly in phase: The temperature minimum is in winter, while the salinity minimum is mostly in late autumn. The depth of the instruments being below the surface mixed layer and the temperature and salinity range suggest that the variations do not reflect the immediate influence of the atmosphere (melting/freezing/warming) but rather a shift between halocline branches. The results emphasize the need for upstream information of halocline circulation for a full understanding of the involved processes. The Ocean-Atmosphere-SeaIce-Snowpack (OASIS)
Project While Polar regions encompass a large part of the globe, little attention has been paid to the interactions between the atmosphere and its extensive snow-covered surfaces. Recent discoveries in the Arctic and Antarctic show that the top ten centimeters of snow is not simply a white blanket but in fact is a surprisingly reactive medium for chemical reactions in the troposphere. It has been concluded that interlinked physical, chemical, and biological mechanisms, fueled by the sun and occurring in the snow, are responsible for depletion of tropospheric ozone and gaseous mercury. At the same time production of highly reactive compounds (e.g. formaldehyde, nitrogen dioxide) has been observed at the snow surface. Air-snow interactions also have an impact on the chemical composition of the snow and hence the nature and amounts of material released in terrestrial/marine ecosystems during the melting of seasonal snow-packs. Many details of these possibly naturally occurring processes are yet to be discovered. For decades humans have added waste products including acidic particles (sulphates) and toxic contaminants such as gaseous mercury and POPs (persistent organic pollutants) to the otherwise pristine snow surface. Virtually nothing is known about transformations of these contaminants in the snowpack, making it impossible to assess the risk to the polar environment, including humans. This is especially disconcerting when considering that climate change will undoubtedly alter the nature of these transformations involving snow, ice, atmosphere, ocean, and, ultimately, biota. To address these topics an interdisciplinary group of scientists from North America, Europe and Japan is developing a set of coordinated research activities under the banner of the IGBP programs IGAC and SOLAS. The program of Ocean- Atmosphere-Sea-ice-Snowpack (OASIS) interactions has been established with a mission statement aimed at determining the impact of OASIS chemical exchange on tropospheric chemistry and climate, as well as on the surface/biosphere and their feedbacks in the Polar regions of the globe. It is proposed that this program will culminate in a concerted field project during the next IPY. In this contribution we will present the details of the emerging OASIS science plan and progress towards its implementation. Carbon Dioxide (and Methane) sensors:
prospective for the greenhouse gases detection in the Arctic Ocean
using the ice-tethered platform Completing the balance sheet for the global carbon budget is a task at the forefront of natural sciences. Because the CO2 and CH4 inter-hemispheric gradients and seasonal amplitudes show that the northern environment is a major contributor to the Northern Hemisphere CO2 and CH4 maxims and seasonal variations, the role of the Arctic Ocean as sources and sinks of these greenhouse gases must be evaluated. Our present knowledge of the temporal and spatial distribution of the net CO2 flux between ocean and atmosphere is derived from a combination of limited by temporal and spatial coverage data of field measurements and model results. However, until the 1990s, the Arctic Ocean had been generally ignored in understanding the global CO2 budget. Only last decade few research groups investigated the CO2- system in the Arctic Ocean, mainly in the western part of the Eurasian Arctic, including the Barents and Kara Seas. Until now we have very limited information on the carbon chemistry of the Beaufort, Chukchi, East Siberian, and Laptev Seas. Polar marine regions are suggested to have a potential for increased CO2 uptake as a result of seasonally high bio-productivity and high seawater solubility, except shallow Siberian shelf, where a large amount of terrestrial organic material is transported to the ocean (that is induced by coastal erosion and rivers) is decomposed and produce the CO2. It is little known at present about connection between sea-ice conditions (and characteristics) and the CO2 flux through sea-ice, whereas sea-ice cover is permeable medium for CO2. Leads, polynyas, and melt ponds could be the places of effective sink of CO2 in summer and source of CO2 in winter (Kelley and Gosink, 1988; Makshtas et al., 2003; Semiletov et al., 2004, accepted). To evaluate the Arctic Ocean effect on the regional atmospheric CO2 budget, we need to investigate the role of the sea-ice and water system in CO2 pumping and dynamics of the carbonate system. Detection of pCO2 beneath the sea-ice is an important component of this complex study. Methane. The highest source of natural gases (mostly CH4) is stored in gas-hydrates beneath permafrost in Siberia. There are not any experimental data indicated a present increase in instability of hydrate environment, but the latter would be vulnerable if the permafrost is warming. While the Holocene sea level rise (about 100-120m) should increase the stability of off-shore gas hydrates in term of the pressure increase, the increased temperature could be leading factor in destabilizing of gas hydrates. Note that at present the mean annual temperature at the top of bottom sediment/permafrost is equal to temperature of sea water near bottom and slightly negative (0°C – minus 2°C), whereas in the past, when during the Late Pleistocene the main part of the Arctic shelf was exposed to atmosphere, the annual mean permafrost surface temperature was minus 15°C and lower. Therefore, we can assume that shallow off-shore gas hydrate could be vulnerable because the shallow bottom sediment and underlying permafrost have been warmed about 15°C after flooding during the Holocene optimum (about 6-8 kyr ago), whereas hydrostatic pressure was quasi-stable over the last several millenniums. The response of the Siberian permafrost reservoir of ancient carbon to global warming and consequent release of greenhouse gases can be an important feedback in the Arctic climate system. Ebullution of methane from the seabed has been found in the surface waters beneath the sea-ice in the Arctic and Subarctic seas (Semiletov, 1999; Obzhirov, 2002) that indicates the possible gas hydrate disturbance. Principally new all-seasonal data could be obtained beneath the sea-ice by means of an observing system based on ice-tethered drifting platforms. Authors present results of deployment of the SAMI- CO2 sensor beneath the fast ice near Barrow, and discuss prospective to use the autonomous pCO2 (SAMI) and CH4 (METS) sensors in framework of the new WHOI based project. Sea-Ice Mass Monitor (SIMMon) A miniature self-spooling winch climbs an ice-tethered cable until it contacts the ice. The small and light-weight design enables helicopter transportability and hand-deployment through an 8 inch ice-hole. Drift position and ice data are relayed by Argos satellite communication. An Autonomous Ocean Flux Buoy (AOFB)
Advances in high resolution, low-powered sensor technology, (particularly in current measurement), and the stable platform provided by the perennial ice pack have provided an opportunity to make un-attended measurements of vertical momentum, heat and salt fluxes through the ocean mixed layer using direct eddy correlation techniques. Under NSF funding, an ice-deployed ocean flux buoy has been developed to measure these fluxes and upper ocean current structure as the buoy drifts for periods of up to 2 years. During the development stage, three buoys have been set in near the North Pole since April 2002 as a component of the North Pole Environmental Observatory. Co-located ice flux and bulk atmospheric measurements (including solar radiation) by NPEO collaborators, provide year-long ocean-ice-atmosphere fluxes for the ice floe through an annual cycle before the ice drifts into the Atlantic Ocean. An instrument cluster suspended from the buoy 6m below the ice base measures time series of (u,v,w,T,C) while an ADCP measures current structure into the pycnocline. The main controller/processor within the buoy provides switched power and communication for up to 8 instruments, processes the data streams, and stores outbound data frames for transmission twice a day. The buoy uses Iridium satellite phone technology to bring back platform position and velocity, current profiles, spectral covariance quantities, raw time series, and processed fluxes, and has sampling strategies updated with each daily data transmission. High resolution nitrate measurements using
the InSitu Ultraviolet Spectrometer Year-round high-resolution measurements of nitrate concentration in the surface ocean are critical to understanding the primary productivity of the Arctic. It is virtually impossible to acquire water samples during the early growing season. With the development of a new sensor, nitrate measurements can be obtained at a resolution similar to traditional physical data, allowing for much more detailed understanding of small scale biological processes. The new In Situ Ultraviolet Spectrophotometer (ISUS) developed by MBARI and marketed commercially by Satlantic uses ultraviolet absorption spectroscopy techniques to measure in situ dissolved nitrate. This new technology provides chemical-free measurements of in situ nitrate and has been field tested on drifting buoys, towed vehicles, moorings and CTD profilers. The instrument is solid state with no moving parts and has a sensitivity of 0.25uM and a 1% accuracy with post-processed CTD temperature corrections. The sensor is rated to 1000m and has a life of 1000 hours of sampling before servicing is required. We have used the sensor successfully on towed vehicles for 1000+ hours, on a CTD/rosette package for 400+ vertical profiles, and on one 6-month mooring deployment September 2003 May 2004 in the Bering Sea. Appendix 6: List of
Workshop Participants
Ashjian, Carin Bienhoff, Paul Bottenheim , Jan W Boyd, Tim Brown, Jerry Carmack, Eddy Colony, Roger Conlon, Dennis Coon, Max Dethloff, Klaus Drobot, Sheldon Edwards, Margo Esipov, Igor Ezraty, Robert Fahrbach, Eberhard Geiger, Cathleen Gobat, Jason Guay, Chris Hanna, Magda Michael, Peter J. Hara, Yasuhide Huntley, Dave Hutchings, Jenny Krembs, Chris Krishfield, Rick Langevin, Danielle Lee, Craig Matrai, Patricia A Mauritzen, Cecilie McLaughlin, Fiona Melling, Humfrey Mohseni, Kamran Moritz, Richard Naugolnykh, Konstantin Owens, Breck Perovich, Don Petolas, Bernie Plueddemann, Al Prinsenberg, Simon Proshutinsky, Andrey Pryamikov, Sergey Pyle, Tom Reves-Sohn, Rob Ryabinin, Vladimir Schauer, Ursula Semiletov, Igor Sidall, Greg Takashi, Kikuchi Toole, John Thornton, Sarah J. Twitchell, Paul von Alt, Chris Winsor, Peter ADCP: Acoustic Doppler Current Profiler AOFB: Arctic Ocean Flux buoy AOOS: Arctic Ocean Observing System AOMS: Arctic Ocean Monitoring System ARCUS: Artic Research Consortium of the United States AUV: Autonomous Underwater Vehicle CliC: WCRP Climate and Cryosphere project CTD: Conductivity, Temperature, and Depth instrument DIC/DOC: Dissolved Inorganic/Organic Carbon Fixed assets or platforms: Includes cable observatories, mooring networks, beacons and acoustic transmitters GODAE: Global Ocean Data Assimilation Experiment GPS: Global Positioning System HAFOS: Hybrid Arctic Float Observation System IABP: International Arctic Buoy Program IBO: Ice-Based Observatory IMB: Ice Mass Balance buoy IOEB: Ice-Ocean Environmental Buoy IPY: International Polar Year (2007-2008) JAMSTEC: Japan Agency for Marine-Earth Science and Technology J-CAD: JAMSTEC Compact Arctic Drifter buoy JCOMM: Joint WMO-IOC Technical Commission for Oceanography and Marine Meteorology MEMS: Micro ElectroMechanical Systems NEMS: Nano ElectroMechanical Systems NOAA: National Oceanic and Atmospheric Administration NPEO: North Pole Environmental Observatory NSF: National Science Foundation Mobile assets or platforms: Includes drifters, profiling floats, gliders, AUVs, and UAVs. PAR: Photosynthetically Available Radiation PI: Principal Investigator PIC/POC: Particulate Inorganic/Organic Carbon RAFOS: Ranging And Fixing Of Sound instrument SALARGOS: Salinity Argos buoy SAR: Synthetic Aperture Radar SEARCH: Study of Environmental Arctic Change SOFAR: reverse RAFOS instrument UAV: Unmanned Autonomous Vehicle ULS: Upward Looking Sonar USN: United States Navy WCRP: World Climate Research Programme WHOI: Woods Hole Oceanographic Institution |