Research Engineer Matt Heintz tests the capibilities of a manipulator arm that he helped develop for the new deep-diving vehicle Nereus in the WHOI Deep Submergence Lab. In this case, he is seeing how the arm handles pushing cylindrical tubes into the seafloor to take sediment samples. On May 31, 2009, Nereus successfully dove to Challenger Deep, where it took sediment samples from the deepest part of the world’s ocean. Learn more about Nereus and the team of engineers who developed the vehicle in a series of interviews featured in Oceanus Magazine.
(Photo by Tom Kleindinst, Woods Hole Oceanographic Institution)
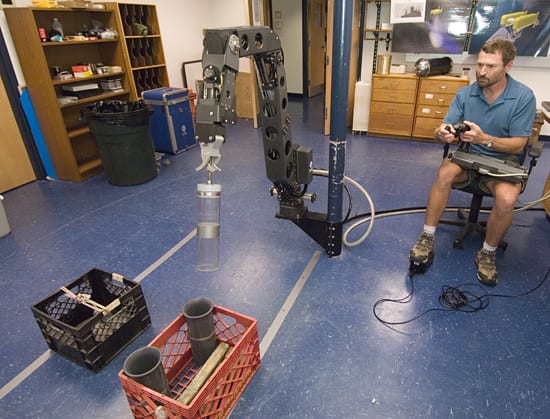
Image and Visual Licensing
WHOI copyright digital assets (stills and video) contained on this website can be licensed for non-commercial use upon request and approval. Please contact WHOI Digital Assets at images@whoi.edu or (508) 289-2647.