
Image
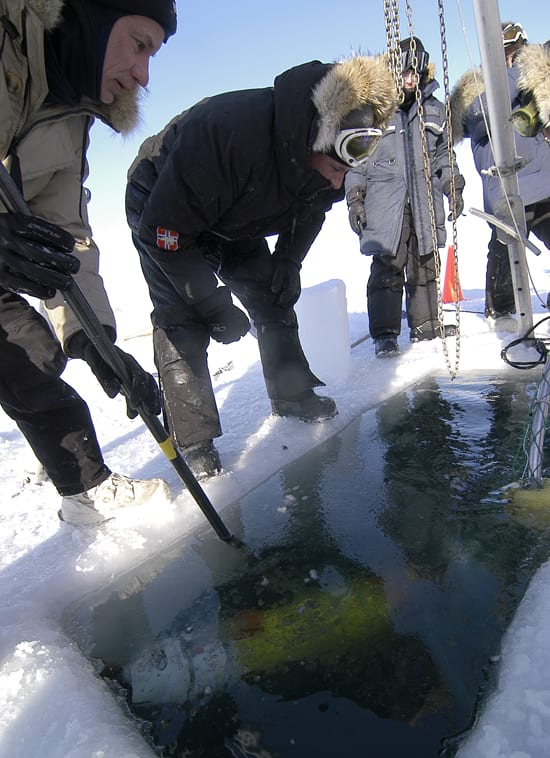
Ice fishing for an AUV
April 30, 2010Al Plueddemann and Kris Newhall recover the autonomous underwater vehicle (AUV) REMUS 100 from an ice hole in Barrow, Alaska. The WHOI research team, led by Plueddemann and Amy Kukulya, worked from land-fast ice to test the under-ice capabilities of the REMUS AUV. In this icy, high-risk environment, the team had to use hand saws and ice axes to cut through one-to-two meters of ice in order to launch and recover the the REMUS safely. A net capture system was also tested for recovering the vehicle at depth and under ice. Typically, AUVs are run in open water and float to the surface when their mission is over in order to use GPS and iridium satellites to mark its location, and then a boat is used for recovery. However, the icy environment filled with massive ice ridges all the way up to the shoreline eliminate that capability and make it a very high risk and technically challenging operation.
(Photo by Amy Kukulya, Woods Hole Oceanographic Institution)
Image and Visual Licensing
WHOI copyright digital assets (stills and video) contained on this website can be licensed for non-commercial use upon request and approval. Please contact WHOI Digital Assets at images@whoi.edu or (508) 289-2647.