
1986 Return to the RMS Titanic
In July 1986, nine months after their discovery of the wreck of RMS Titanic, the Deep Submergence Laboratory (DSL) team at the Woods Hole Oceanographic Institution (WHOI) returned to the wreck site to conduct test dives as part of the continuing development of the lab’s Argo/Jason imaging system, designed for scientific missions to explore and photograph the deep sea floor.
The primary purpose of the twelve dives aboard the Institution’s three-person submersible Alvin was to evaluate DSL’s new prototype remotely operated vehicle, Jason Jr., known by the team as JJ.
In 1983, the U.S. Navy’s Office of Naval Research (ONR), and later the Office of Naval Technology (ONT), awarded DSL $2.8 million to build a revolutionary exploration vehicle system called Argo/Jason. The first phase of that development effort was the building of the Argo search system, a towed vehicle equipped with low-light level television cameras and capable of working to depths of 20,000 feet. Argo was successfully tested in the summer of 1985 at the Titanic site, resulting in the luxury liner’s discovery.
Following that discovery, Argo conducted its first major science program in late 1985 on an undersea mountain range off the west coast of Mexico called the East Pacific Rise. That program, also sponsored by ONR, successfully found and delineated numerous underwater warm-water springs and recent sites of underwater volcanic eruptions. In that one cruise, Argo nearly equaled the amount of imagery taken on all the mid-ocean ridge systems worldwide in the previous decade.
The second major step was the testing of the prototype Jason vehicle, a much smaller remotely operated vehicle named Jason Jr., and development of a fiber optic handling system for use in the deep sea. Fiber optic cables, although common today, were not in use in the deep sea and required significant engineering advances. Unlike traditional coaxial cables with limited bandwidth, fiber optic cables permit vast amounts of color imagery, other data and power to be transmitted to the sea floor. No one had successfully operated an ROV in very deep water, or used a fiber optic cable system like this in the deep sea before.
The final step in DSL’s development of the Argo/Jason vehicle system occurred in late 1988 with the final at-sea testing of the larger remotely operated vehicle Jason, built on what was learned from Jason Jr. during the 1986 Titanic dives and subsequent missions. Jason, a more sophisticated robot, had high-quality color still and video cameras and advanced manipulators for close-up inspection and sampling. Jason’s first mission for science took place in May 1989 with exploration and discovery of the first hydrothermal vents in the Mediterranean Sea off Sicily, and discovery of the first deep-sea archaeology site.
Two major development steps, however, were necessary before Jason could work from Argo. The first was the design, construction, and installation of a dynamic positioning system on the WHOI research vessel Knorr and a similar series of steps leading to the development of an advanced fiber optic cable connecting the Argo/Jason vehicle system to the control center, two remodeled standard 20-foot shipping containers designed as a TV studio of sorts by WHOI staff, aboard Knorr. The dynamic positioning system on Knorr was needed to hold Argo stationary in up to 20,000 feet of water, allowing Jason to swim freely while tethered to Argo. The fiber optic cable would enable the high-quality color television cameras on Jason to transmit their signals to the scientists in the control vans aboard Knorr.
The Jason Jr. testing program during the July 1986 Titanic dives made it possible for DSL engineers to temporarily bypass the dynamic positioning system and fiber optic cable requirements by using Alvin in place of Argo. With Alvin sitting on the bottom, a stable launch platform for Jason Jr. was assured, and the color television signals from Jason Jr. transmitted to the scientists in Alvin eliminated, for the moment, the need for a fiber optic cable thousands of feet long, which did not yet exist. In essence, the testing program in on the wreck of Titanic in the summer of 1986 permitted the Argo/Jason program to develop in parallel instead of in series, bringing Jason on line years ahead of time.
Jason Jr. was used on Alvin instead of the full Jason vehicle, also under development at DSL, because Jason—with its stereo camera system and large dual manipulators—was too large and its power requirements too great for Alvin to handle. The testing program, however, provided DSL engineers with the opportunity to evaluate those subsystems of Jason which were common to both Jason and Jason Jr., such as the vehicle tether and tether management system connected to either Alvin or Argo, the differential pressure gauge, the heading stabilized rate transducer, the closed-loop control of vehicle heading and depth, the propulsion system, and the high resolution color video system.
Of secondary interest to the U.S. Navy regarding the use of Alvin and Jason, Jr. in the area of the Titanic wreck site was to demonstrate that operations by human-occupied submersibles near deep-water wrecks could be carried out safely. A remotely operated vehicle such as Jason, Jr. or Jason could approach and investigate wreckage on the seafloor while the human-occupied submersible stands at a safe distance. The January 1986 loss of the space shuttle Challenger and the loss of the Air India jet in the cold North Atlantic clearly demonstrated such a national need, and Woods Hole Oceanographic staff was called upon in both cases to assist recovery efforts.
A third objective of the 1986 return expedition to Titanic was to finish the film documentation of Titanic begun during the final four days of the 1985 discovery cruise aboard the Knorr using the Argo and ANGUS vehicles. This filming had two primary purposes: to capture carefully the present state of Titanic, should other organizations eventually attempt to salvage the wreck, and demonstrate the rapidly evolving technology of "telepresence," which is hoped to eliminate the need to salvage wrecks.
Expedition leader Robert Ballard believed in 1986 that through the use of advanced robots like Jason Jr. and its successors, society will be able to visit historic sites in the ocean like the Titanic and tour their exterior and interior compartments as if visiting a museum. The cold temperature, great pressure, absence of sunlight, and the slow sedimentation rates in the deep sea create a preserving environment for such historic finds, which have a better chance of surviving the ravages of time if not brought to the surface where the torn remains would rust and deteriorate. However, metal rusts in the deep sea and over decades will eventually deteriorate, and wrecks like Titanic will eventually be lost.

The Woods Hole Oceanographic Institution's return expedition to the Titanic site in July 1986 was another team effort. More than 50 people spent nearly three weeks at sea and countless more support staff worked ashore before, during and after the expedition. Expedition leader once again was Dr. Robert Ballard, a senior scientist in the Institution’s Ocean Engineering Department and head of the Institution's Deep Submergence Laboratory (DSL). The return expedition departed Woods Hole, Massachusetts, July 9 and returned to Woods Hole July 28, 1986. (©Woods Hole Oceanographic Institution)
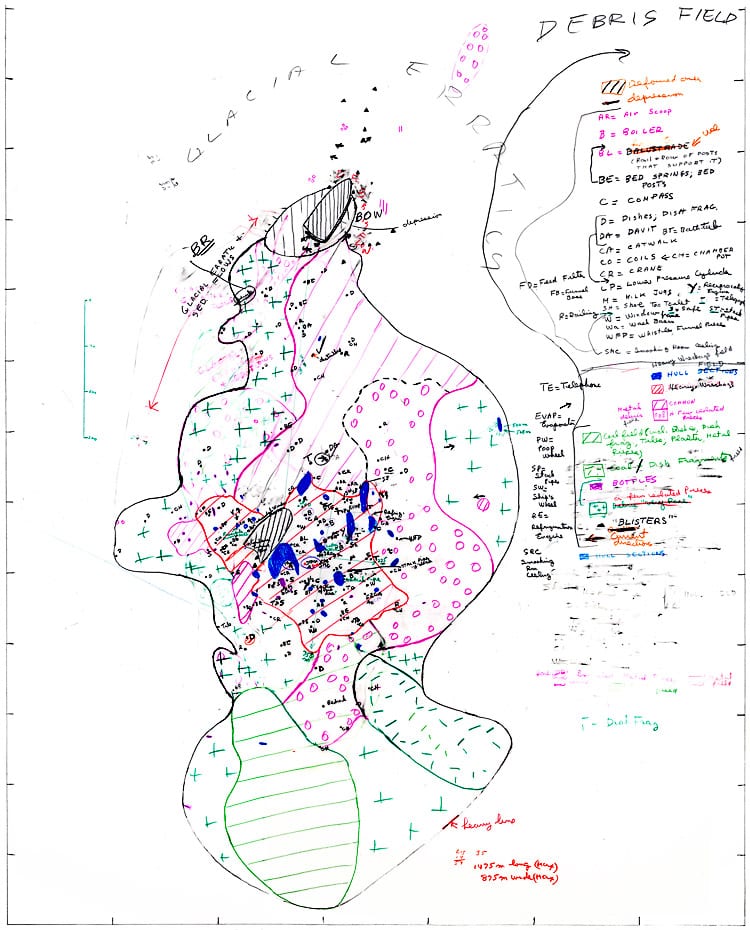
This hand drawn map of the wreck and surrounding debris field was created by the 1986 exploration team. Details were added to the map as the daily dives were completed. (©Woods Hole Oceanographic Institution)