
Multimedia Items
Illustration showing the approximate flight path of Air France flight 447

Map shows the approximate flight path of the ill-fated Air France Flight 447. (Illustration by Amy Caracappa-Qubeck, © Woods Hole Oceanographic Institution)
Read MoreOcean Robots: Air France Flight 447

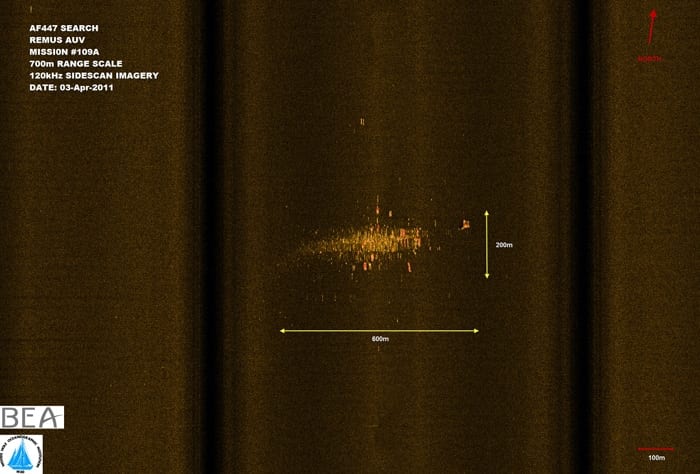
Questions surrounding the disappearance of Air France flight 447 could only be answered by finding the wreckage of the airplane on the rugged seafloor of the mid-ocean ridge—a job designed…
Read MoreSearch for Air France Flight 447
The REMUS 6000
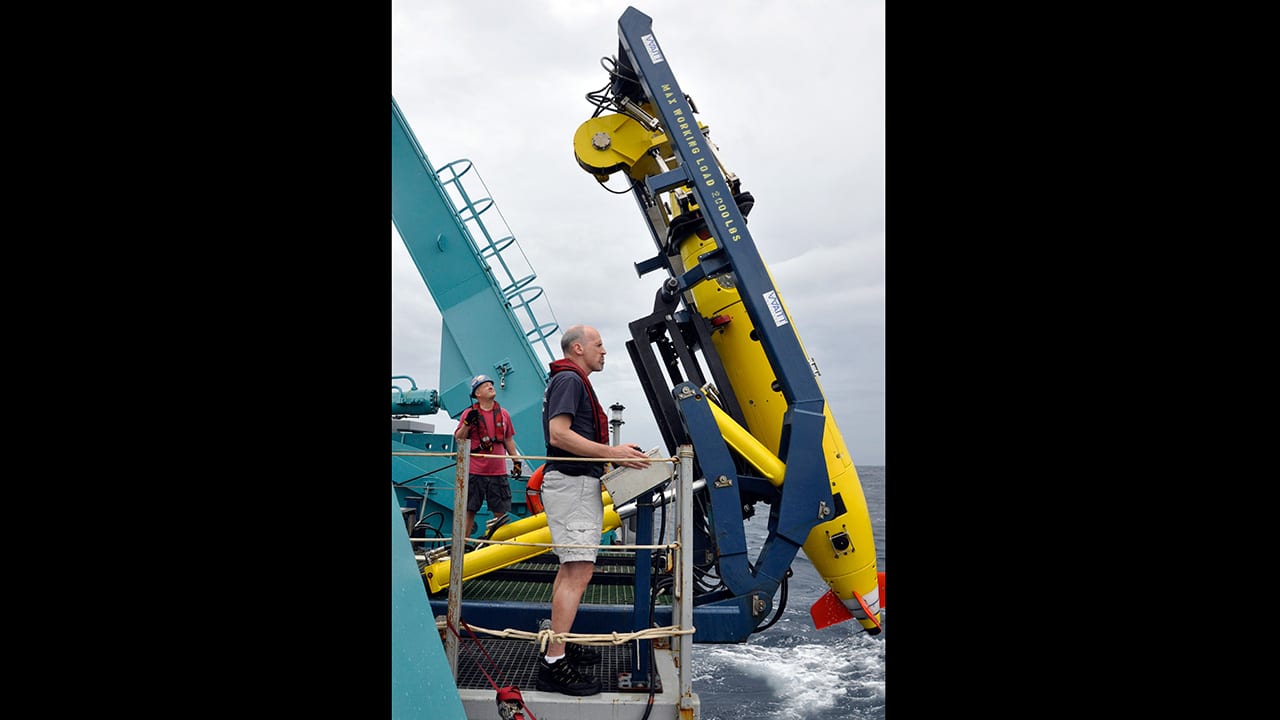
WHOI Principal Engineer Mike Purcell (foreground) and Research Specialist Mark Dennett work with the REMUS 6000, an autonomous underwater vehicle, on a 2011 cruise that located the wreckage of Air…
Read MoreREMUS 6000 Test

WHOI engineers Amy Kukulya and Mark Dennett tested a REMUS 6000 autonomous underwater vehicle (AUV) from the WHOI dock in 2014. Researchers have used the vehicle to locate Air France…
Read MoreTest Drive

On a calm, cold afternoon in January, a team from the Oceanographic Systems Lab at WHOI took a REMUS 6000 autonomous underwater vehicle for a test run in Woods Hole…
Read MoreYellowfin REMUS

WHOI engineer Daniel Bogorff launches a REMUS 6000 off of the Institution’s dock in Woods Hole’s Great Harbor. Equipped with high-resolution bathymetric scanning technology and an extended-life battery pack, the…
Read MoreA Capable Tool

The REMUS 6000, developed at WHOI to map the ocean floor, is probably best known for locating the wreckage of Air France Flight 447 in 2011, two years after it…
Read MoreBeacon Hill Comes to WHOI

Massachusetts House speaker Robert DeLeo (center) gets a primer on the REMUS 6000 from principal engineer Mike Purcell (right), while Jim Rakowski, director of state government and external relations at…
Read MoreReady for Launch

Fred Wendt of IFM Geomar and WHOI research specialist Mark Dennett (partially hidden) inspect the REMUS 6000 autonomous underwater vehicle owned by the WAITT Institute as it is positioned on…
Read MoreREMUS Away

WHOI senior engineering assistant Greg Packard (far left) helps launch a REMUS 6000 autonomous underwater vehicle in April 2011. The vehicle, owned by the Waitt Institute, was taking part in…
Read MoreAUVs Assist in Search

Members of the REMUS Operations Group Steve Murphy, Mark Dennett, and Robin Littlefield (left to right), pose with one of the REMUS 6000 autonomous underwater vehicles (AUVs) built in 2008…
Read MoreReady to mow

A Remote Environmental Monitoring Unit (REMUS) 6000 vehicle sits on the deck of a ship during a 2009 mission. Three REMUS 6000 vehicles, designed by the Ocean Systems Laboratory at…
Read MoreReadying REMUS

Brennan Phillips (right) and Greg Packard (background) work on two Remote Environmental Monitoring UnitS — or REMUS vehicles — in the Ocean Systems Laboratory at WHOI. Three REMUS 6000 vehicles…
Read MoreDeep Diver

WHOI research specialist Mark Dennett (right) helps guide a REMUS 6000 autonomous underwater vehicle (AUV) into Great Harbor in Woods Hole for testing in July. Dennett and a team from…
Read More